首页 > 心得体会 > 学习材料 / 正文
以光学信号为导向的夜间救援车型机器人系统研究
2023-01-16 16:30:09 ℃宋广进,杜云龙
(南阳师范学院 机电工程学院,河南 南阳 473061)
灾难的发生总是突然且极具破坏性的,受灾地区情况复杂、易产生二次灾难,救援队对被困人员的情况及地形不了解,对于被困人员的及时发现与救援物资的及时送达等都很困难。如果灾难发生在夜间则更加令人头疼,夜间的黑暗条件让救援难度显著加大,如果仅仅依靠以往单一的人工救援既会使救援人员陷入危险境地,又使得救援时间过长,被困人员的生还概率降低[1]。因此,在如今人工智能高速发展的时代,要让人工智能与救援相融合,打造依托于人工智能技术的高速智能救援系统就显得十分重要,对于受灾待救援人员与救援人员都有着至关重要的现实意义。
本文所研究的夜间仿生救援车型机器人就是针对夜间黑暗条件下实现辅助救援的机器人,其可以编入智能救援系统,作为其重要一环,达到高效安全救援的目的。它是根据生物的趋光性原理来实现光信号引导该机器人的前进,对光的敏感性让它可以在黑暗中迅速捕捉到光源信号,及时找到遇难者,我们也可以利用无人机或探照灯等人为给它光信号,让它辅助搜救队员进行营救工作,如进行救援物资的运送与位置信息传输等,为被困人员与搜救队员提供安全保障,提升救援效率。
1.1 总体结构
此夜间仿生救援车型机器人是由Arduino开发板、光线传感器、超声波传感器、驱动电动机、蓝牙通信模块、5 V供电电源等部分组成,整体结构框图如图1所示。其仿照生物向光性原理,可以依靠光线传感器感知光源方向,由控制器检测是否达到光线阈值,进而驱动电动机,实现追踪光源方向行驶;
利用超声波传感器检测机器人与周围障碍物之间的距离,进行合理避障,具有很强的灵活性和机动性。

图1 机器人总体结构
1.2 主控制器模块
机器人是以Arduino开发板系列的Arduino UNO为控制核心,其晶振频率为16 MHz,工作电压5 V,具有6路模拟输入与14路数字IO口,数字IO口中有6路可提供PWM输出,功能可靠,价格低廉,Arduino UNO开发板结构如图2所示。通过控制模拟端口A0~A5,将周围环境情况和光源信号转换为电信号传输给控制器,然后再通过数字端口PWM口(2,3,4,5,6,7,8,9,10,11,12,13)把从周围感知来的信息通过程序算法判断处理,输出控制指令,驱动舵机的运转,控制机器人灵活地进行相应行动。
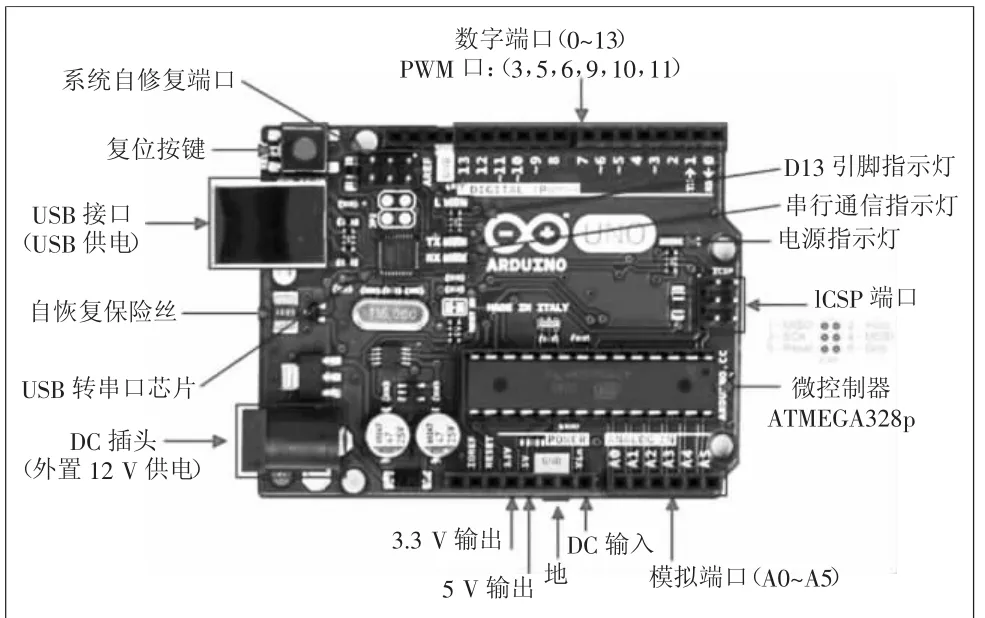
图2 Arduino开发板结构
1.3 检测模块
机器人检测模块包括3个超声波传感器和3个光线传感器,分别装在机器人的前方、左侧及右侧位置,传感器所检测到的模拟信号通过AD转换器转换为数字信号传输给控制器,控制器判断信号大小及方向输出控制指令。光线传感器即为光敏电阻,随着光照强度的增大,光敏电阻阻值变小,控制器通过检测光敏电阻阻值的大小即可知道此时光线强度的强弱。依据光敏电阻的这种特性,机器人内部设置相应的光强启动阈值,即100 kΩ。光线传感器时刻“捕捉”光源信号,当光照强度达到阈值要求,即光敏电阻阻值小于100 kΩ时,机器人进入工作状态,开始辅助救援;
阻值大于100 kΩ时,机器人进入待机低电量消耗状态。
超声波测距模块利用超声波良好的特性,检测初始超声波与回波的时间差,对机器人的周边环境进行实时监测[2],监测机器人与障碍物间的距离,进而实现自动避障转弯,它是通过电平触发的方式来实现,其工作原理为:只需要在TX管脚输入一个10 μs以上的高电平,系统便可发出8个40 kHz的超声波脉冲,然后检测回波信号。当检测到回波信号后,通过RX管脚输出。控制器接收超声波传感器的信号,时刻监测机器人与障碍物之间的距离,当机器人前方距离障碍物小于15 cm时,机器人开始转弯避障,此时控制器对比左右两侧超声波传感器所检测到的距离大小,若机器人左侧与障碍物之间的距离大于右侧,机器人左转,反之则机器人右转。
1.4 电动机与通信模块
机器人的行走是依靠舵机的驱动,控制器根据光线传感器与超声波传感器的信号来判断周围情况,进而驱动舵机。舵机作为一种伺服电动机系统,具有很高的性价比,控制器通过控制脉冲宽度调制来控制舵机的旋转角度[3],动力经由电动机、减速齿轮组到舵盘,并且可以利用与舵盘输出轴相连的反馈电位计将反馈信号传输给控制器,进行位置修正,提高控制精度,进而控制舵机的正常运转,驱动机器人的前进与转弯避障。
机器人通过蓝牙模块与智能救援系统其他机器人进行信息交换,然后按照拟定的通信协议传输信息,便可实现一系列功能,达到远程操控的目的[4]。此机器人与救援系统其他机器人之间通过蓝牙连接形成微微网,进而整个智能救援系统形成分布式网络。但是由于蓝牙模块受到通信距离的限制,在野外大范围搜救时存在一定局限性,下一步可采用Zigbee无线通信技术进一步扩展,实现远距离的通信传输,让整个智能救援系统更加可靠地连在一起,更好地实现协同。
救援机器人通过自身的3个光线传感器,可以接受来自前、左、右3个不同方向的光源信号,然后通过Arduino开发板的AD转换模块将模拟信号转换为数字信号,控制器内部设定程序判断外部光源强度是否达到启动要求,若达到光敏电阻阈值,则触发驱动模块执行相应动作,进而由控制器控制机器人的前进、左转、右转等运动状态[5]。机器人的前、左、右3个方向的超声波传感器可以时刻监控机器人自身和周围障碍物的距离,可以有效避开障碍物,达到自动行驶的目的[6]。机器人所装配的GPS定位系统可以时刻报告它的位置信息,并通过通信模块帮助我们反馈一下所需要的参量,与其他机器人协同,实现智能化救援,减少人员伤亡,提高救援速度。
机器人的整体运转情况,首先是机器人工作模式的确定,由光线传感器识别确定;
然后是机器人的行走与避障,由光线传感器与超声波传感器共同确定;
最后是机器人位置信息的传输,由通信模块进行信息传递。机器人行进的软件流程如图3所示。

图3 软件流程图
实验时由手电筒作为光源,在机器人样机与光源之间以及机器人左侧设置障碍物,测试机器人的行进状态,测试过程如图4所示。实验结果显示,机器人在接收到光源信号时朝着光源前进,在距离障碍物15 cm时,机器人开始向右转弯,避开障碍物,继续朝着光源前进。

图4 机器人追光避障
以机器人前方的光线传感器和超声波传感器为例,测试其在不同场景下的检测结果,如图5所示,超声波传感器实时监测机器人与障碍物之间的距离,光线传感器检测是否达到机器人启动阈值。其中图5(a)为黑暗条件,此时光敏电阻的阻值很大,为523~532 kΩ,距离前方障碍物19 cm,机器人保持待机状态;
图5(b)为正常启动工作条件,即机器人接收到强光源,此时光敏电阻的阻值显著变小,为33 kΩ左右,达到了机器人的启动阈值,机器人开始启动向前方行进。
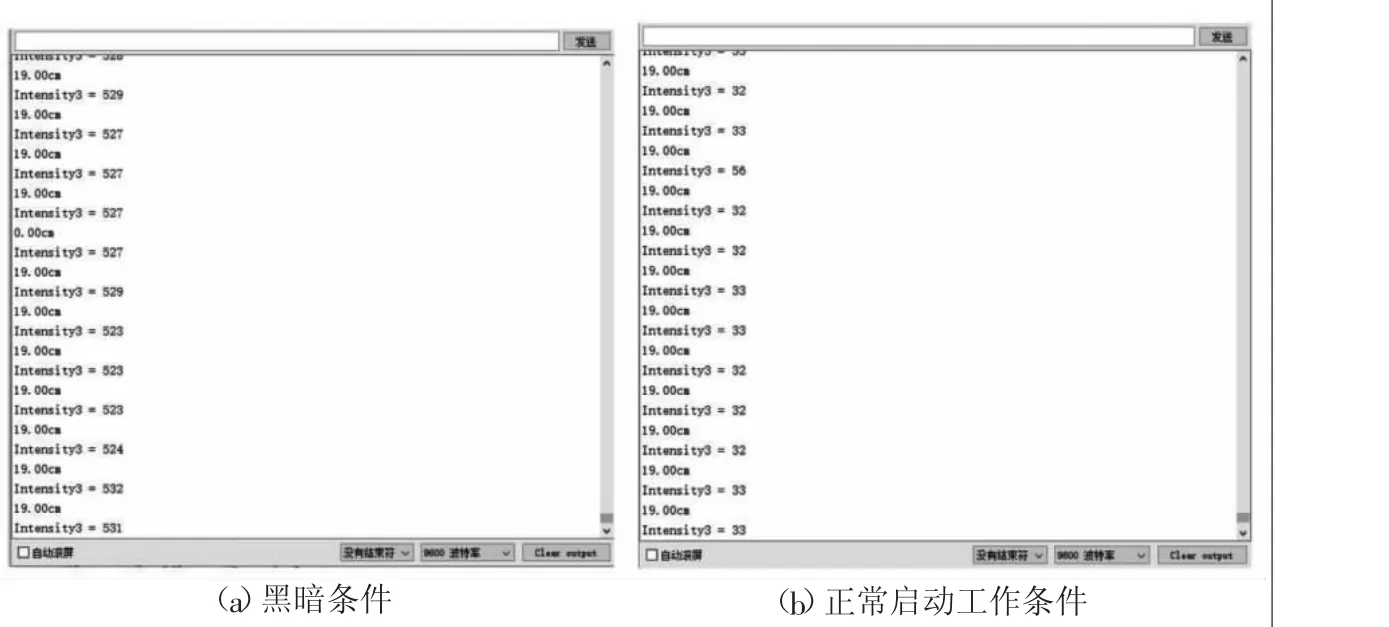
图5 启动及避障阈值确定
机器人系统搭建完成后,可以实现随光源前进与避障功能,对于整个智能救援系统有着重要的辅助作用,在此基础上进行位置信号传输与救援物质输送的研究将进一步完善救援系统,对被困人员与搜救队员都有着重要意义,推动了智能机器人行业的发展。
猜你喜欢 光敏电阻障碍物光源 与往年相比,我们的选择更多更好了 2021国内外主流激光与LED光源家用投影机攻略家庭影院技术(2021年9期)2021-11-05光源改变光环境上海工艺美术(2021年4期)2021-04-24享受LED光源的卓越色彩 Acer(宏碁)PD1530i家庭影院技术(2021年2期)2021-03-29高低翻越动漫界·幼教365(中班)(2020年3期)2020-04-20赶飞机创新作文(1-2年级)(2019年4期)2019-10-15月亮为什么会有圆缺好孩子画报(2019年10期)2019-01-10光敏电阻的特性研究电子技术与软件工程(2016年20期)2016-12-21橡塑保温管切割台的输送带控制电气线路改造科技视界(2016年21期)2016-10-17天地间唯一的光源扬子江(2016年1期)2016-05-19太阳能跟踪系统的研究科技视界(2016年9期)2016-04-26猜你喜欢
- 2024-01-20 有关于第五次全国经济普查统计重点业务综合培训大会上讲话(完整文档)
- 2024-01-20 “严纪律、转作风、保安全、树形象”专题学习教育活动通知(完整文档)
- 2024-01-20 2024XX区住房城乡建设工作情况汇报
- 2024-01-20 2024高校思政教育交流材料:善用反腐败斗争这堂“大思政课”(精选文档)
- 2024-01-20 2024年主题教育专题党课辅导报告,(4)
- 2024-01-20 关于赴某地学习考察地方立法工作情况报告(范文推荐)
- 2024-01-20 2024年度关于增强党建带团建工作实效对策与建议(精选文档)
- 2024-01-20 教师演讲稿:春风化雨育桃李,,潜心耕耘满芬芳(全文)
- 2024-01-20 主题教育第二阶段来了
- 2024-01-20 2024年度关于到信访局实践锻炼个人总结【完整版】
- 搜索
-
- 打赌输了任人处理作文1000字7篇 05-12
- 当代大学生在全面建设社会主义现代化强 05-12
- 全面建成社会主义现代化强国的战略安排 03-10
- 个人廉洁自律方面存在的问题及整改措施 05-12
- 谈谈青年大学生在中国式现代化征程上的 05-12
- 2022年党支部第一议题会议记录(全文完 11-02
- 作为青年大学生如何肩负时代责任6篇 05-12
- 村党组织建设现状及工作亮点存在问题与 05-12
- 全面从严治党,自我革命重要论述研讨会 05-12
- 产业工人队伍建设改革(全文完整) 10-31
- 11-25国庆70周年庆典晚会 庆典晚会串词
- 11-25办公室礼仪的十大原则 浅谈办公室的电话礼仪
- 01-17用心灵轻轻地歌唱_心灵的歌唱
- 01-17也许你不是我一生的唯一|也许不是我
- 01-17爱了,请珍惜;不爱,趁早放手|爱就珍惜不爱就放手
- 01-17岁月带走的是记忆,但回忆会越来越清晰|有趣又有深意的句子
- 01-17曾经的美好只是曾经,我只想珍惜身边的人|我只想珍惜你
- 01-18从容不惊 [学会笑眼去看世界,不惊不乍,淡定从容]
- 02-03当代大学生学习态度调查报告
- 02-03常用护患英语会话
- 标签列表
