首页 > 心得体会 > 学习材料 / 正文
基于三维激光扫描的城市位置尺度信息测量方法
2023-02-24 19:05:05 ℃苏顺谦 李 帅 杜立杰 张 杰
(1.北京华城工程管理咨询有限公司,北京 100083;
2.北京速测信息科技有限公司,北京 100080)
随着城市测绘技术的发展,人们对城市地理信息测绘的精度要求越来越高。利用激光雷达(light detection and ranging,LiDAR)、惯性测量单元(inertial measurement unit,IMU)等技术构建城市测绘和地理模型,实现对城市建筑高楼、桥梁、隧道、行道树等城市地物遮挡和干扰环境下的精准测试,提高城市位置尺度信息测量能力,研究城市位置尺度信息测量方法,在复杂城市场景下厘米级的高精度制图方面具有重要意义[1]。
对城市位置尺度信息测量是通过激光雷达增量式扫描实现的,利用移动测量平台,通过激光和IMU融合的方法,获取城市位置尺度信息测度模型。传统方法中,对城市位置尺度信息测量方法主要有基于激光同时定位与地图构建(simultaneous localization and mapping,SLAM)的测量方法、基于GNSS/IMU组合导航移动测量的城市地理位置信息测量方法、基于GNSS因子和闭环因子联合控制的城市位置尺度信息测量方法等[2,3]。文献[4]中提出面向高精度城市测绘的激光耦合SLAM方法,引入杆状和面状特征进行点云配准,通过激光惯导的紧耦合控制,实现城市位置尺度信息测量,但该方法进行城市位置尺度信息测量的全局优化能力不强,抗高层建筑以及城市绿化的干扰能力不强。文献[5]中提出融合点云和多视图的车载激光点云路侧多目标识别方法,通过多视角图像和激光点云数据扫描的方法和中高级全局特征分析,提升路侧、行道树、车辆和杆状设施的分类精度,该方法进行高精度地图要素构建中存在信息干扰度大的问题。
针对上述问题,本文提出基于三维激光扫描的城市位置尺度信息测量方法。首先采用三维激光耦合扫描的方法构建城市位置尺度分布的网格结构模型,然后进行三维激光扫描的图像特征分析,通过单帧点云稀疏性的场景融合方法,实现城市位置尺度信息测量,最后进行仿真测试,从而展示了本文方法在提高城市位置尺度信息测量精度方面的优越性能。
1.1 总体设计框架结构模型
在进行基于三维激光扫描的城市位置尺度信息测量设计中,需要首先通过三维激光扫描的方法进行城市位置分布的点云数据标记和图像样本数据采集,对采集的城市位置三维激光扫描图像进行视图信息融合,提取图像中的目标全局特征点和点云局部特征点,利用不同模态下的城市位置三维激光扫描图像数据层次分布,构建激光点云的多视觉城市图像深度预测模型。城市位置尺度信息的3个模块分别是:(1)城市位置目标点的云特征检测模块。该模块实现对城市道路及交通位置信息的离散特征采样;
(2)城市位置信息的地物结构标记模块。通过对相同类别的地物形状特征分析和标记,建立以路侧地物原始点云的信息数据库,通过SLAM算法进行地图模型设计,提取路测目标参数,实现局部集合信息特征检测;
(3)城市位置尺度信息的点云多视图特征融合模型。由于路侧地物形态各异、复杂多样,通过点云数据融合,采用激光扫描系统获得城市场景点云数据。由此,得到系统的框架结构(如图1所示):

图1 城市位置尺度信息测量的框架结构
结合图1的结构模型,采用局部地图构建及优化控制,结合激光帧序列补偿和配置的方法,获取城市位置尺度信息的激光帧传感数据及深度图像数据信息,在杆状点和面状点标记初始地面,并利用广度优先算法(breadth first search,BFS)在角度图像上实现对城市位置尺度信息的激光序列帧标记,搜索与地面像素间角度差值小于5°的像素,通过地物特征检测,进行特征点配置,城市位置尺度标记的学习模型(如图2所示):

图2 城市位置尺度标记的学习模型
根据上述构建的城市位置尺度标记及学习模型,结合图像分析的方法,建立地物参数解析和三维激光扫描的图像分析模型,通过位置因子构造的方法,进行全局的地图参数分析,利用联合局部的地图位置参数分析,提取出城市尺度的GNSS角点构成GNSS位置,采用基于特征点的配准方法,实现激光序列帧融合和邻域特征点匹配。
1.2 城市位置尺度分布特征点匹配
通过建立基于三维激光扫描和序列帧结构的特征点匹配模型,基于原始激光点数据位姿匹配和配准的方法,进行城市位置尺度分布特征点匹配,处理流程描述如下:
(1)采用原始激光帧序列检测的方法,获取城市位置尺度标记信息的激光点集描述为ρt={ρ1,ρ2,…,ρn},生成的三维激光城市扫描图像描述为(c,r),城市位置三维激光扫描图像的单帧点ρi对应的一个城市位置信息分布像素,c、r分别为城市位置信息标记点的列数和行数,三维激光扫描的深度值为ρi到初始点云数据之间的欧式距离。
(2)采用城市位置三维激光扫描图像帧扫描和空间位置匹配的方法,将图像的相邻行像素间的倾斜值进行自适应匹配和滤波处理,得到每一列位置点标记c对应的城市场景像移测量值为ar,基于邻居节点匹配的方法,分析城市位置地r-1,c面像素分布模型,采用角度图像匹配,结合对原始激光点数据配置以和激光序列的帧变换分析,得到城市位置的相对关系。
(3)通过不同帧间特征点的匹配,用u(n)(x,y;
d)表示位置因子约束参数,其中,x,y,d分别为全局地图构建以局部地图特征点的分布参数集,通过位置因子匹配和深度学习,得到像素分布序列,采用位姿估计和增量式控制,得到城市位置特征点分布的有向图G′=(V,E′),其中E′是E的非空子集,此时特征点对视为同名特征点。
(4)利用三维激光扫描方法求解获取相邻帧,结合特征变换,构建一幅M×N的P bit二值图像,表示城市位置尺度信息分布图,通过序列帧配准和IMU测量,进行尺度信息测量。
2.1 城市位置尺度信息帧变换
结合对原始激光点数据配置以及激光序列的帧变换分析,采用单帧点云稀疏性的场景融合方法,得到城市场景移动测量的仿射特征参数,在L个位平面中,获取角度图像分布集,求解激光序列帧间状态方程,描述如式(1)所示:

式(1)中,Ct为对应的点云标记系数;
Ce为地面点的邻域搜索参数;
||xi||为像素点之间的距离;
h(xi)为三维激光扫描的灰度值;
bint和bine分别为基于原始激光点数据的边缘特征点;
vxi为角度图像上搜索分量;
δ为单帧扫描获取激光点的测试函数;
hisxi为激光三维扫描初始的转换关系系数;
联合点到线距离和点到面距离为G,如式(2)所示:

采用单帧点云稀疏检测的方法,得到激光序列帧测量参数序列,如式(3)、式(4)所示:

式(3)、式(4)中,I为轨迹数据栅格化分割参数;
G(x,y,σi)为成像位置在x处的二值化模板匹配参数;
stdfilt(x,y,wi)为标准颜色特征;
σi为激光序列帧系数;
(x,y)为测量坐标系分布,计算局部地图集合的像素中心(xc,yc),并记录于arraypd中,得到城市位置尺度信息帧变换表达式,如式(5)所示:

式(5)中,Modelw,Modelh分别为GNSS位置因子;
xd和yd为GNSS位置信息和激光惯导检测信息;
xo和yo为初始的城市位置尺度参数;
s(x,y)为面状点分布数据;
M为点到线距离参数。
2.2 城市位置尺度信息测量输出
通过三维激光扫描,构建高程、强度、法向量等特征向量,其变换关系,如式(6)所示:
式(6)中,σi为激光扫描的空间分布位姿结构参数;
ei为基于位姿图优化获取最终的图模型参数;
μ为地面点对于垂直方向的阈值,μ>0,由此在激光扫描的三维图像I(x,y)中,单帧点云稀疏性Retinex角点分布矩阵为H,如式(7)所示:

式(7)中,Lxx(x,σ) 为高斯二阶偏导在X处与图像I的卷积,Lxy(x,σ)、Lyy(x,σ)具有相似含义。通过构建高程、强度、法向量等特征向量的分布参数,根据城市位置尺度的激光点云数据分布实现精准测量,在测量点P(x,y)的测量矩阵,如式(8)所示:

式(8)中,H为激光点云数据精准测量在测量点P(x,y)的测量矩阵;
f(σ)为城市位置尺度信息测量函数。综上分析,根据城市位置尺度的激光点云数据分布实现精准测量。
为了验证本文方法的有效性,进行实验测试分析。实验测试数据采用的激光扫描仪为Velodyne VLP-16 LiDAR型激光扫描仪,数据的场景来自于城市街区道路、城市公园、移动车辆以及开放园区等,数据集分布概况(如表1所示):
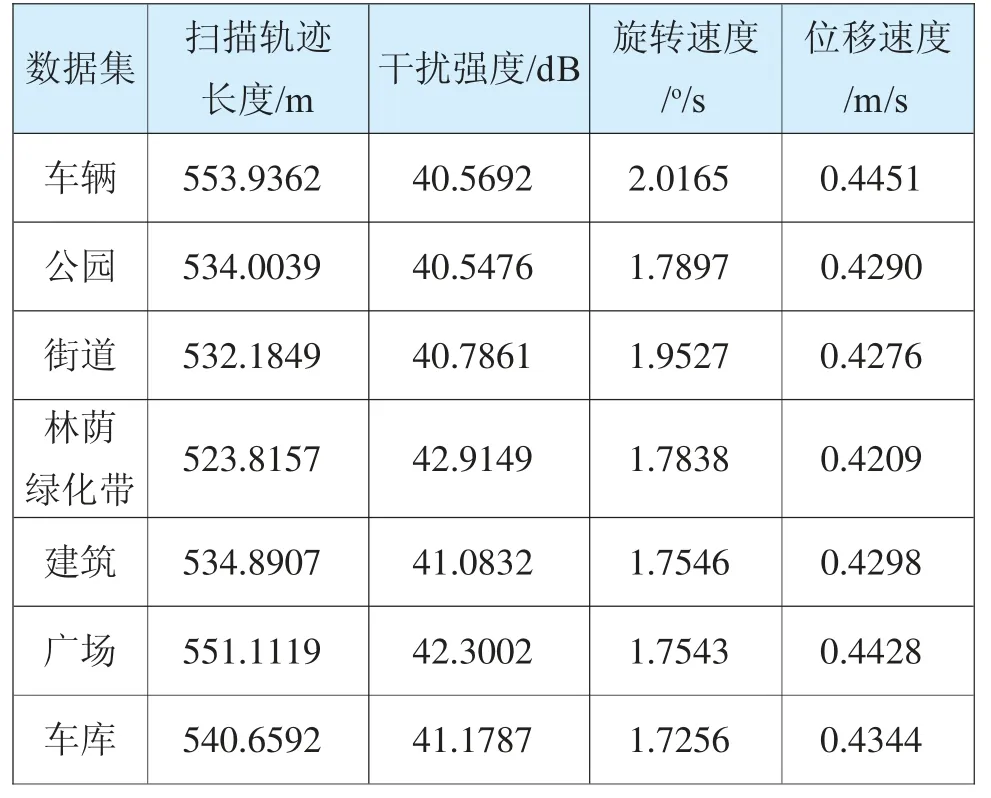
表1 城市位置尺度信息采集参数
根据上述参数设定,进行不同场景下的城市位置尺度信息测量,得到三维激光扫描测量结果(如图3所示):


图3 三维激光扫描测量结果
分析图3可知:本文方法实现了不同场景下的城市位置尺度信息检测和测量,以其中一组场景为例,对比位置尺度信息测量的准确性,对比结果(如图4所示):测试测量的精准度,得到对比结果(如表2所示),分析表2可知:使用本文方法进行城市位置尺度信息测量的精准度更高。

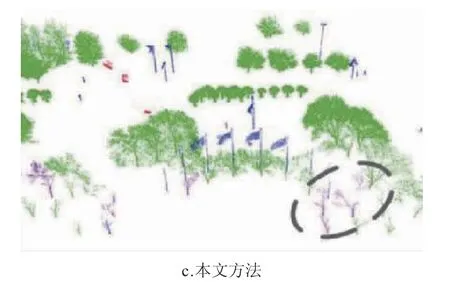
图4 测量准确性对比测试结果

表2 测量精准度对比
本文提出基于三维激光扫描的城市位置尺度信息测量方法。构建激光点云的多视觉城市图像深度预测模型,建立以路侧地物原始点云的信息数据库,通过SLAM算法进行地图模型设计。通过位置因子构造的方法,进行全局的地图参数分析,利用联合局部的地图位置参数分析,提取出城市尺度的GNSS角点构成GNSS位置测量模型,实现位置尺度测量。研究得出,本文方法的测量精度较高,性能可靠稳定。
猜你喜欢 尺度激光特征 根据方程特征选解法中学生数理化·中考版(2022年9期)2022-10-25离散型随机变量的分布列与数字特征中学生数理化(高中版.高考数学)(2022年3期)2022-04-26Er:YAG激光联合Nd:YAG激光在口腔临床医学中的应用昆明医科大学学报(2021年6期)2021-07-31激光诞生60周年科学(2020年5期)2020-11-26财产的五大尺度和五重应对内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06不忠诚的四个特征当代陕西(2019年10期)2019-06-03请给激光点个赞小哥白尼(趣味科学)(2019年2期)2019-04-17宇宙的尺度太空探索(2016年5期)2016-07-12激光3D长绳儿童故事画报·发现号趣味百科(2016年3期)2016-06-249时代英语·高三(2014年5期)2014-08-26- 上一篇:交互设计理念在工业设计中的应用探析
- 下一篇:多功能辅助健身器械的设计
猜你喜欢
- 2024-01-20 有关于第五次全国经济普查统计重点业务综合培训大会上讲话(完整文档)
- 2024-01-20 “严纪律、转作风、保安全、树形象”专题学习教育活动通知(完整文档)
- 2024-01-20 2024XX区住房城乡建设工作情况汇报
- 2024-01-20 2024高校思政教育交流材料:善用反腐败斗争这堂“大思政课”(精选文档)
- 2024-01-20 2024年主题教育专题党课辅导报告,(4)
- 2024-01-20 关于赴某地学习考察地方立法工作情况报告(范文推荐)
- 2024-01-20 2024年度关于增强党建带团建工作实效对策与建议(精选文档)
- 2024-01-20 教师演讲稿:春风化雨育桃李,,潜心耕耘满芬芳(全文)
- 2024-01-20 主题教育第二阶段来了
- 2024-01-20 2024年度关于到信访局实践锻炼个人总结【完整版】
- 搜索
-
- 打赌输了任人处理作文1000字7篇 05-12
- 当代大学生在全面建设社会主义现代化强 05-12
- 全面建成社会主义现代化强国的战略安排 03-10
- 个人廉洁自律方面存在的问题及整改措施 05-12
- 谈谈青年大学生在中国式现代化征程上的 05-12
- 2022年党支部第一议题会议记录(全文完 11-02
- 作为青年大学生如何肩负时代责任6篇 05-12
- 村党组织建设现状及工作亮点存在问题与 05-12
- 全面从严治党,自我革命重要论述研讨会 05-12
- 产业工人队伍建设改革(全文完整) 10-31
- 11-25国庆70周年庆典晚会 庆典晚会串词
- 11-25办公室礼仪的十大原则 浅谈办公室的电话礼仪
- 01-17用心灵轻轻地歌唱_心灵的歌唱
- 01-17也许你不是我一生的唯一|也许不是我
- 01-17爱了,请珍惜;不爱,趁早放手|爱就珍惜不爱就放手
- 01-17岁月带走的是记忆,但回忆会越来越清晰|有趣又有深意的句子
- 01-17曾经的美好只是曾经,我只想珍惜身边的人|我只想珍惜你
- 01-18从容不惊 [学会笑眼去看世界,不惊不乍,淡定从容]
- 02-03当代大学生学习态度调查报告
- 02-03常用护患英语会话
- 标签列表
