首页 > 心得体会 > 学习材料 / 正文
货车移动遮断影响下的跟驰风险异质性建模
2023-02-25 12:05:07 ℃谢世坤,杨 轸,戢晓峰
(1.同济大学道路与交通工程教育部重点实验室,上海 201804;
2.昆明理工大学交通工程学院,云南昆明 650500)
受公路设计标准和地形地质条件等综合限制,山区双车道公路呈路窄、弯多、坡陡等特征,行车环境极其复杂。同时,伴随着物流业的快速发展,交通流中货车占比不断加大,加之货车具有体积大、载重多、行驶速度相对慢等特性,会持续遮断后车驾驶员行驶视线,由此导致后车低速跟驰、逆向借道或占用硬路肩超车等高风险驾驶行为频繁发生,引发较高的事故风险。据统计,货车-小客车事故占货车事故的60%,其中,小客车驾驶员死亡率高达83%[1],可见,货车移动遮断导致的行车安全问题已成为交通安全领域亟待解决的现实问题。
国内外学者较早开展了低速货车对道路通行能力及行车安全造成的影响研究,包括货车移动瓶颈[2]、移动屏障[3]、货车结伴效应[4]等。2021年,戢晓峰等[5]首次针对山区双车道公路货车遮断现象展开研究,发现货车遮断导致小客车行车速度降低20~30 km·h-1,平均跟驰时距为小于《公路工程技术标准》中规定的最小安全值,一定程度上会增加小客车驾驶风险。由于货车移动遮断影响下不能及时获取道路前方交通信息,后车驾驶员更倾向于跟驰行驶。跟驰行驶时受货车压迫和视距受限的影响,驾驶员会出现紧张等心理变化,导致驾驶员改变其跟驰行为,引起车头时距等微观驾驶特征改变影响交通流稳定性。为量化与评估车辆跟驰风险,大多数学者从仿真实验数据和自然驾驶数据出发,利用统计分析和机器学习等方法构建跟驰风险评估模型[6-9]。随着研究不断推进,风险场理论被提出并应用于行驶风险研究,如Wu[10]等基于风险场理论构建了自动驾驶车辆跟驰风险概率预测模型。
上述研究虽考虑了交通流对跟驰车辆的影响,但集中于高速和城市道路等多车道公路。与多车道公路相比,双车道公路车辆运行更为复杂,车辆驾驶行为不仅受本车道前车干扰,同时受对向车道来车影响。并且山区双车道公路特殊线形和货车低速行驶性能会导致相邻车辆跟驰行为与常规交通流不一致,后方小客车通常会选择减速跟驰或跨线占道跟驰来等待超车机会,频繁调整车速和占用对向车道,造成货车移动遮断路段交通流扰动,进而增加后方小客车跟驰风险[11-12]。基于此,本文通过设计无人机车辆轨迹数据采集实验,开展山区双车道公路货车移动遮断发生机理及对小客车跟驰行为的影响研究。综合考虑交通冲突风险可能性和严重度,建立货车移动遮断场景内小客车跟驰风险评价方法和分级标准,采用随机参数有序probit(FP-ORP)模型构建小客车跟驰行为风险预测模型,并基于边际效应和弹性系数定量分析货车移动遮断场景下车辆属性、驾驶员行为差异、跟驰特性与小客车跟驰风险间的相互关系,从而为道路交通管理部门制订和实施山区公路交通安全管理办法工作提供理论和技术支撑。
1.1 货车移动遮断
货车动力性能差异大、行驶速度慢,其平均行驶速度小于车流整体平均速度(特别是小客车平均速度),对货车后方车辆行驶扰动严重。而山区双车道公路行车条件复杂,且道路无中央隔离带,在货车影响影响下,后方车辆近距离跟驰、占道超车等高风险驾驶现象普遍,导致较高的事故风险,该现象称为货车移动遮断。
基于与云南省公路局联合监测的货车移动遮断现象,结合移动瓶颈理论[13],提出山区双车道公路货车移动遮断的概念,即某一低速货车行驶在双向两车道公路上,由于道路线形条件和货车性能限制,遮断货车后方驾驶员行驶视线,导致货车后方出现单一或成队等待超车的车辆,且该车辆(队)随交通流一起发生移动的现象。移动遮断是静态设施(道路线形)与动态设施(运行车辆),以及交通流内部各车辆间相互作用的结果,其导致的道路时空资源损失随时间空间动态变化的。如图1所示。

图1 山区双车道货车移动遮断现象Fig.1 The classic scene of truck movement block on two-lane mountain highway
1.2 移动遮断形成机理分析
结合交通流理论,解析双车道公路货车移动遮断的发生机理,如图2 所示。设某一长度为L,流量为q的山区双车道路段,有正常行驶的货车(速度为VT0,状态①)和小客车(速度为VC0,状态②,VT0<VC0)。开始路段小客车以速度VC0运行,当小客车进入货车遮断场景后(t1时刻),路段车流将以速度VC1前进(VC1≤VT0,状态③),整体交通流的速度不稳定。根据交通工程学压缩波模型,路段将形成速度小于VT0集结波F1(状态④),即遮断形成。当路段满足超车条件后(t3时刻),小客车将以速度VC2超车(VC2>VT0,状态⑤),排队车辆相继完成超车,形成消散波F2(状态V),路段车流重新进入正常行驶状态(状态②),即遮断消失。当道路线形和交通流条件远远满足超车需求时,道路通行效率则不被货车移动遮断影响。
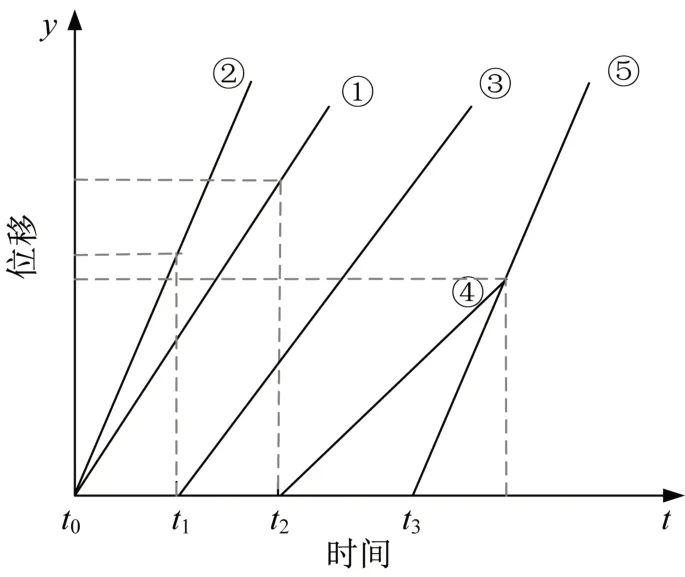
图2 山区双车道货车移动遮断发生机理Fig.2 The mechanism of truck moving block on twolane mountain roads
由此可得,货车移动遮断包括跟驰和超车2 个阶段,驾驶员在不同阶段采取不同的操作行为。当对向车道交通流和本车道车辆间能够提供可以超车和回车的能力时,小客车驶入对向车道完成超车;
当超车条件不满足时,小客车只能根据前方货车行驶状态来选择合理车速跟驰行驶,并且时刻关注道路线形和对向车道交通流情况等待超车。通过对移动遮断场景内紧邻小客车驾驶行为统计,发现超车行为占30.38%,而跟驰行为占69.62%,是双车道公路货车移动遮断场景内的典型驾驶行为。
当小客车在货车移动遮断场景内跟驰行驶时,驾驶员视线长期被低速货车遮挡,不能及时准确地获取道路前方交通信息,导致小客车产生强烈的超车需求。后方驾驶员均想通过改变其驾驶行为超越其前方低速货车,尽快离开货车移动遮断场景,出现频繁变速(速度变异系数为0.463)、跨线行驶(横向偏移分布在-0.83 m 至1.76 m 区间)、强制超车(40%超车视距小于规范值250 m)等危险行为,这些行为使得交通流极不稳定,进而增加驾驶员行车风险。因此,本文以货车移动遮断影响下的小客车跟驰行为风险为评估对象。
2.1 数据采集与处理
为获取高精度的货车移动遮断轨迹数据,本文选取云南省典型山区双车道元双公路进行数据采集。在良好的天气条件下,采用大疆御MAVIC 2专业版无人机在200 m高空进行连续拍摄,拍摄时间2019年9月25日至9月30日8:30~18:00,为提高拍摄结果的精度,地面比例标定方法采用专用钢尺测定。
采用日本名古屋大学开发的视频处理软件George2.1 追踪视频中目标车辆的行驶轨迹数据。数据处理流程如图3所示。设置车辆轨迹提取频率为10 HZ,控制图像坐标与地面坐标的精度误差在±0.05 m 之内,通过坐标变换、轨迹提取、轨迹平滑等流程,得到货车移动遮断场景内的车辆行驶轨迹数据,如图4所示。George2.1软件能直接输出的轨迹数据包括前后车ID、采样时刻、车辆速度、横向速度、纵向速度、加速度、横向加速度、纵向加速度、前后车位置坐标等。

图3 车辆轨迹数据处理流程Fig.3 Vehicle trajectory data processing flow

图4 货车移动遮断场景内的跟驰小客车跟驰轨迹Fig.4 Trajectory of the car-following in the truck movement blocking scene
2.2 跟驰片段提取
为保证模型参数标定和验证需求,须从数据集中提取满足货车移动遮断和跟驰条件的相关数据,保证包含充足完整的信息。在进行跟驰片段筛选前,先将货车移动遮断影响范围进行限制,通过统计货车场景下第一辆小客车开始减速或加速时的车头间距,将货车与其后方第一辆小客车车头间150 m范围确定为货车移动遮断的影响范围。
从相邻两车的车头间距和车头时距判定跟驰状态。交通流理论认为本车与前车间距在125 m范围内为跟驰行为,也有研究定义本车与前车的车头时距小于5 s时为跟驰行为。对于双车道公路而言,美国HCM[14]认为当车头时距小于或等于5 s 时,车辆处于跟驰状态。因此,提出双车道货车移动遮断影响下的小客车跟驰状态判定准则:小客车和货车车头时距小于或等于5 s。根据该准则对车辆轨迹数据进行筛选,并剔除掉帧、ID无法匹配、非正常驾驶速度等异常数据,得到110 组货车移动遮断场景下的跟驰行为轨迹数据,共计36 960 条。一个典型的跟驰片段如表1所示。图中,VT是前导货车速度;
VC是跟驰小客车速度;
a是跟驰小客车加速度;
s是车辆间距;
h是车头时距。

表1 小客车—货车跟驰片段实测数据Tab.1 A car-truck following process with measured data
3.1 跟驰模型变量选取
3.1.1因变量构建
风险可能性和严重度是评价风险的两个维度,单维度评价不能准确量化交通事故风险。据此,本文提出结合风险可能和风险后果的综合风险指数IR,表征货车移动遮断场景中小客车跟驰行为的风险程度,作为模型因变量。
(1)风险可能性
根据冲突特性及既有研究[17],采用碰撞时间T判别跟驰风险概率。其定义为道路上行驶的车辆不采取避险措施,保持原有速度和轨迹行驶直至碰撞的时间,即

式中:TC(t)为t时刻小客车碰撞货车的碰撞时间;
XT(t)和XC(t)分别为t时刻货车和小客车位置坐标;
VT(t)和VC(t)分别为t时刻货车和小客车地点车速;
lT为货车车长。
通过MATLAB 读取移动遮断场景内货车和小客车行驶轨迹数据,根据位置坐标及两车行驶速度计算出T。参考相关研究成果[15],采用统计学中累计频率分布曲线对冲突风险进行差异化分级。将每起冲突的T值以1s 为间隔进行均等分组处理,计算每组数据的频率及累积频率并绘制累积频率曲线图(图5)。根据帕累托定律分别选定15%、40%、60%、85%位累积频率对应T值为不同风险概率等级判别标准[18]。如表2所示。

表2 不同冲突风险概率等级的碰撞时间阈值Tab.2 Time to collision thresholds for conflict risk probability levels
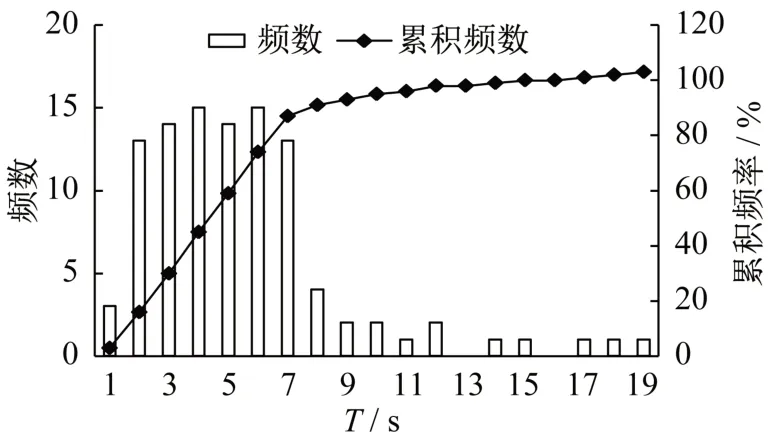
图5 T累计频率分布曲线图Fig.5 Time to collision cumulative frequency distribution curve
(2)风险严重度
相同的T值代表发生碰撞的概率相同,但一个轻微事故与一个人员伤亡事故的严重程度区别明显,故还应考虑冲突潜在碰撞的后果严重性。结合现有研究[16],选取避撞减速度D衡量冲突风险的严重度。定义为跟驰间距较近的两辆车,后车为规避碰撞所需的减速度,即
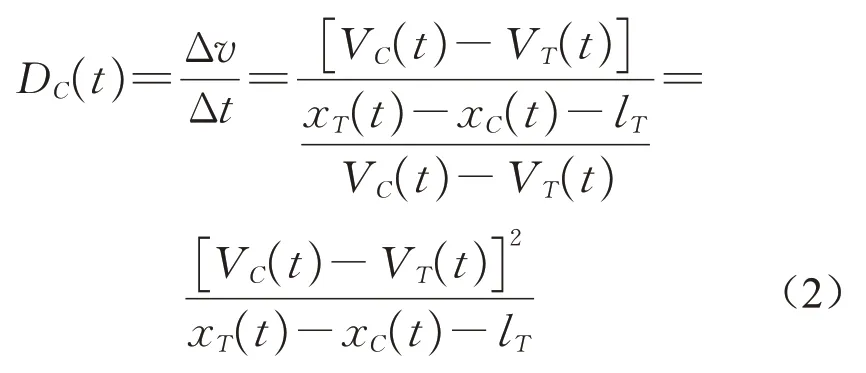
基于D计算值,同理选定15%、40%、60%、85%位累积频率(图6)对应D 值为不同风险概率等级判别标准,获取不同冲突风险概率等级对应的冲突严重程度,如表3所示。
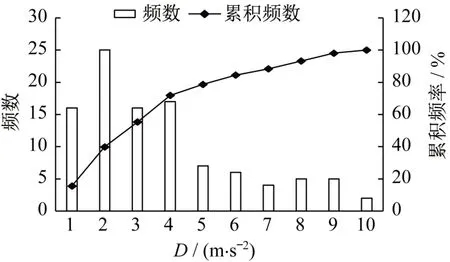
图6 不同冲突风险严重程度等级的避撞减速度阈值Fig.6 D thresholds for different conflict risk severity levels
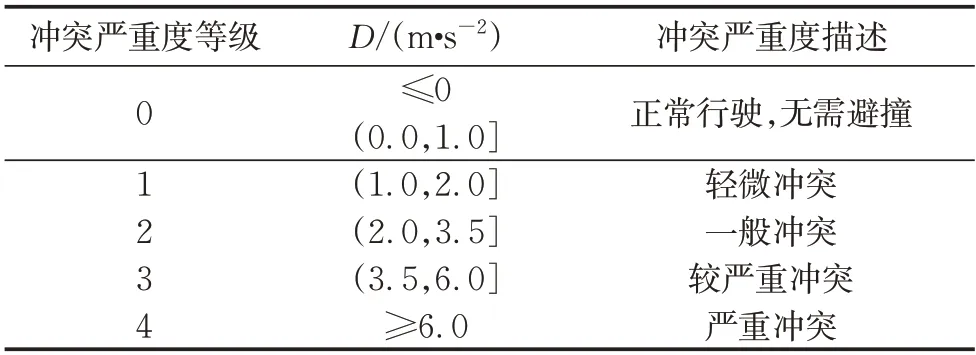
表3 不同冲突风险严重程度等级的避撞减速度阈值Tab.3 D thresholds for conflict risk severity levels
(3)跟驰风险等级
根据式(2)可知,D和T的倒数呈一元一次正相关关系,表明冲突风险概率等级系数和冲突严重度等级可以一一对应,即冲突风险概率越高,冲突风险严重程度概率也越高。已有研究表明冲突风险水平与事故间存在相关系数ρ[17],且该系数与风险变化水平呈S 形曲线关系[18],因此引入比数概念对风险系数进行对数转换(表4),以精确描述交通冲突与交通事故间的关系。

表4 冲突风险系数转换Tab.4 Conversion of collision risk coefficients
基于不同风险水平下T和D统一的风险系数,构造货车移动遮断场景内小客车跟驰行驶时的综合风险指数IR计算公式为如下:

式中:IR表示跟驰风险综合指标,TC(Oi)表示冲突风险概率等级,DC(Oj)表示冲突严重度等级,i,j=0,1,2,3,4。
根据式(3)计算得到货车移动遮断场景内小客车的IR值,将小客车跟驰风险水平划分为四级(表5):零风险水平(I),低风险水平(II)、中风险水平(III)、高风险水平(IV)。

表5 货车移动遮断场景内小客车跟驰风险等级Tab.5 Car-following risk level in truck movement block
3.1.2自变量选取
结合相关研究及现场调研,从交通流特性、跟驰特性和驾驶员风格等方面初步选取14 个影响跟驰行为风险的特征指标(表6)。其中,驾驶倾向指标是选取小客车横向偏移、小客车横向加速度和小客车纵向加速度3个指标,采用KNN无监督聚类算法进行聚类,按照相似程度将其划分为保守型、稳健型和激进型。保守型驾驶员感知低速货车的压迫感最强,会较早产生减速意识,且强烈要求视线前方有足够的空间满足观察对向车道行驶状况和本车道前方行驶趋势;
稳健型驾驶员感知到的货车压迫感次于保守型驾驶员;
激进驾驶员感知到的货车压迫感最小,超车意识强烈。
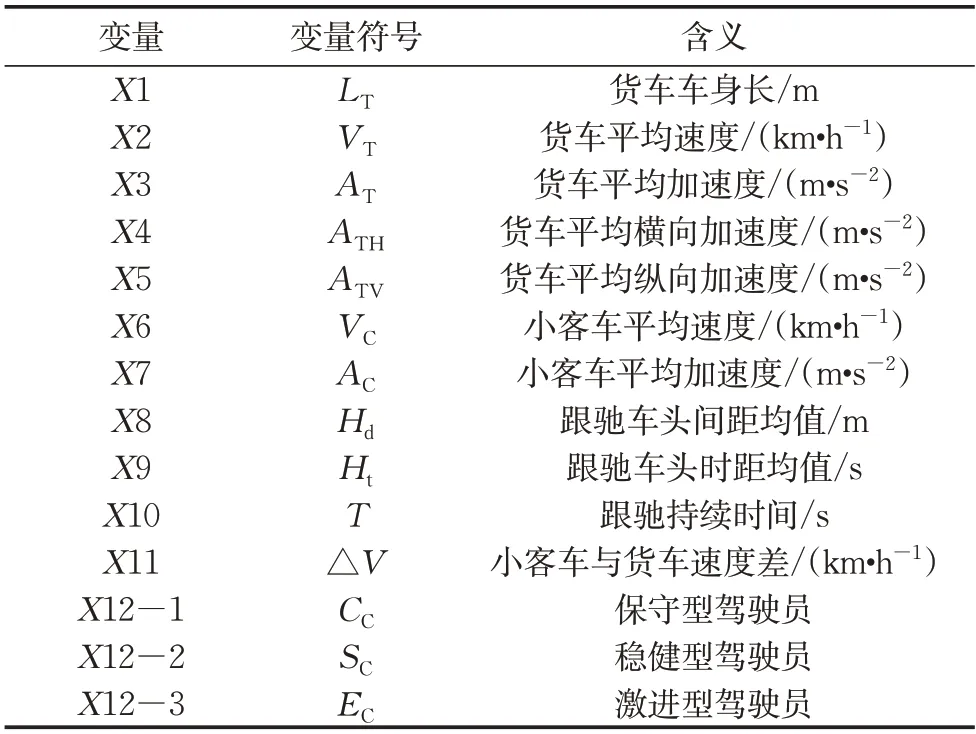
表6 跟驰风险预测模型自变量Tab.6 Independent variables of the car-following risk prediction model
为保证模型预测精度,自变量之间不能出现多重共线性,因此对变量进行相关性分析。Spearman相关性检验不要求变量服从正态分布,且可以较好地减少异常值影响。因此本文采用Spearman 相关系数来检验变量间的相关性。若相关系数大于0.8,说明变量之间存在高度线性相关,则选取相对重要性较大的一个变量作为输入参数。通过Spearman相关性检验(图7),可以发现变量VT与变量VC的相关系数为0.82,表明VT与VC高度线性相关。为避免多重共线性的影响,剔除相关性系数较小的VC,其他变量作为模型自变量。
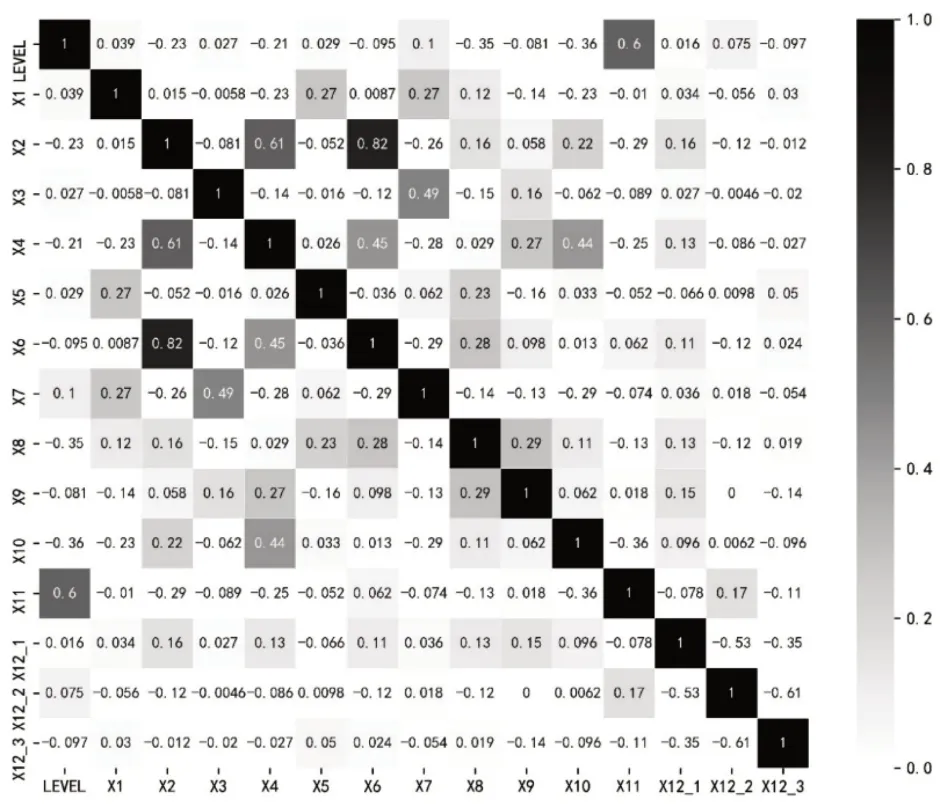
图7 变量相关性矩阵Fig.7 Correlation matrix of variables
3.2 跟驰风险模型构建
车辆行驶风险是由人、车、路和环境中多个因素相互作用引发,数据采集无法全面记录与事故风险相关的所有影响因素,而这些因素会影响参数估计和模型预测准确性[19]。RP-ORP模型可以解决传统固定参数有序probit 模型(FP-ORP 模型)未能考虑个体差异的限制[20]。因此,为了解决数据采集中可能存在的异质性,本文选取RP-ORP 构建山区双车道公路货车移动遮断影响下的小客车跟驰风险预测模型,并与传统FP-ORP 模型进行对比。跟驰风险概率通过效用函数y*推导得到,即

式中:y*货车移动遮断场景内小客车跟驰风险等级,X为自变量向量集,β为系数向量,ε是误差项。小客车跟驰风险y可通过式(4)映射得到,即

式中:y的分类由阈值μ参数确定;
j是最高有序值。本文j有4 个等级,由于误差服从标准正态分布,不同风险等级的冲突概率计算如下:

FP-ORP模型参数被预先假定为不随样本个体而变的固定参数[21]。然而每个变量都有一定的随机效应,通过在每个系数上加上一个服从正态分布的随机误差项,则可导出RP-ORP 模型。RP-ORP 模型第k个解释变量对第i起冲突的随机效应计算如下:

式中:μk和σk分别是βk的均值和标准差;
vik是第i起冲突不可观测的随机效应。
由于参数估计值只能反映各因素对于不同冲突风险水平的影响趋势,不能定量化解释变量影响效应。故采用弹性系数和边际效应值进一步量化各影响因素对不同跟驰风险等级的影响程度。弹性系数是指变量增加1%时,某事故严重等级概率的变化值,由式(8)计算。

式中:Xjk表示等级j的第k个显著变量。但弹性系数仅适用于连续变量,对于分类变量而言,概率不能由分类值微分直接得到。由于每起冲突中每个变量对于各类风险等级均可计算一个值,故通过公式(9)计算分类变量的边际效应[22],即

3.3 模型结果与分析
3.3.1参数估计结果
使用统计分析软件Nlogit5.1进行模型求解,选取显著性水平为0.05,利用蒙特卡洛方法估计参数结果,并采用Halton序列抽样300次求解模型,模型估计结果如表7所示。
由表7 可知,模型收敛时RP-ORP 模型的对数似然拟合值从218.38 提高至231.66,AIC值从260.4 下降到251.7,说明考虑异质性的随机参数模型拟合效果更好。此外,两模型收敛时对数似然值构造似然比统计量LR值为13.28,高于11.07(自由度为5 时,在95%的置信区间内似然比统计量临界值为11.07),再次证明RP-ORP 模型适应度高于FP-ORP模型。
在满足95%置信水平条件下,货车纵向加速度、跟驰车头间距、跟驰持续时间、跟驰速度差、激进型驾驶员5 个变量与小客车跟驰风险水平显著相关。其中,跟驰持续时间和驾驶倾向(激进型)参数为随机参数,且在0.001的显著性水平上显著。
3.3.2模型结果分析
根据模型估计结果(表7)和显著变量边际效应(图8),分析各显著变量对小客车跟驰风险的影响方向和强度。
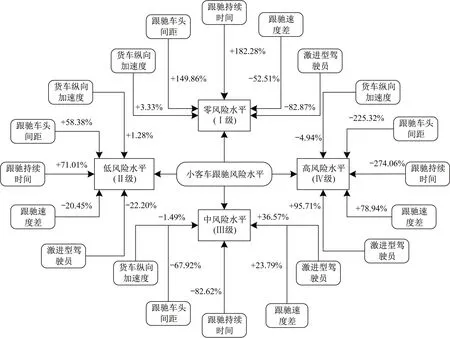
图8 显著变量的边际效应Fig.8 Marginal effects for significant variables

表7 FP-ORP模型和RP-ORP模型的估计结果Tab.7 Estimation results for FP-ORP model and RP-ORP model
(1)货车纵向加速度
货车纵向加速度每增加1 个单位,小客车处于中风险、高风险跟驰状态的概率分别降低1.49%和4.94%。说明移动遮断场景内货车加速度越大(行驶速度越快),对跟驰小客车的期望速度影响越小,小客车更加谨慎驾驶,从而更不容易处于高风险状态。
(2)跟驰过程平均车头间距
跟驰间距每增加1 个单位,小客车处于零风险和低风险行驶状态的概率分别增加149.86%和58.38%,处于中风险和高风险行驶状态的概率分别减少67.92%和225.32%。主要由于货车体积大,车身长,易形成视觉盲区。当小客车与货车间距较大时,小客车在遇到紧急情况时有足够的反应时间,从而可以避免追尾等碰撞事故发生,从而降低跟驰风险。
(3)跟驰持续时间
跟驰时间对应系数服从N(-0.094,0.0832)的正态分布,对行车风险的影响存在异质性效应。根据正态分布累计概率计算结果可知(图9),有12.92%跟驰持续时间较长的小客车

图9 跟驰时间变量正态分布Fig.9 Normal distribution of car-following time
驾驶员倾向于产生更高的行驶风险。87.08%跟驰时间较长的小客车驾驶员倾向于产生较低的行驶风险。对应图8可知,跟驰持续时间每增加1个单位,跟驰行为处于零风险、低风险的概率分别增加182.28%、71.01%。其异质性效应来源于双车道公路不同交通条件下的跟驰时间对风险水平的影响不同。当车流量较小时,小客车一旦受货车移动遮断影响选择立即超车,由于货车影响不能准确判断道路前方信息,会导致车辆风险增加。当车流量较大时,小客车驾驶员持续跟驰行驶,但一直处于准备超车的状态,可能出现超车条件不完全满足但选择超车,进而增加车辆行驶风险。
(4)跟驰速度差
速度差每增加1 个单位,小客车处于中风险和高风险跟驰状态的概率会分别增加23.79%和78.94%,处于低风险和零风险跟驰水平概率会分别降低20.45%和52.51%。原因是车辆间速度差越大,遇到突发状况时驾驶人需要更长的认知和反应时间。且根据能量守恒定律,当碰撞发生时,速度越大能量越大,导致事故越严重。因此,小客车与货车的速度差越大,小客车跟驰风险水平越高。
(5)驾驶员驾驶倾向
激进型驾驶员对应的系数服从N(0.599,1.1392)的正态分布。根据图10 可知,70.19%的激进型驾驶员更容易处于风险更高的行驶状态,29.81%的激进型驾驶员更不容易处于高风险行驶状态。且由图8可得,相对于保守型驾驶员,激进型驾驶员处于中风险和高风险行驶状态的可能性会分别增加36.57%和95.71%。此差异性结果可归因于不同行驶场景下小客车驾驶员驾驶风格对风险水平的影响不同。据统计,激进型驾驶员平均横向偏移86.93cm,其行驶轨迹呈远离行车方向车道、靠近对向车道的趋势,部分小客车越过行车方向车道边界线行驶,导致车辆可能出现与对向来车发生刮擦、弯道路段转向失控等现象,增加高风险行驶水平的发生率。但部分小客车驾驶员出现轨迹偏移,其目的是为了尽可能获取货车前方道路信息并寻找超车机会,当发现对向车道来车或没有足够的超车视距时,驾驶员返回原车道,进而降低行驶风险水平。
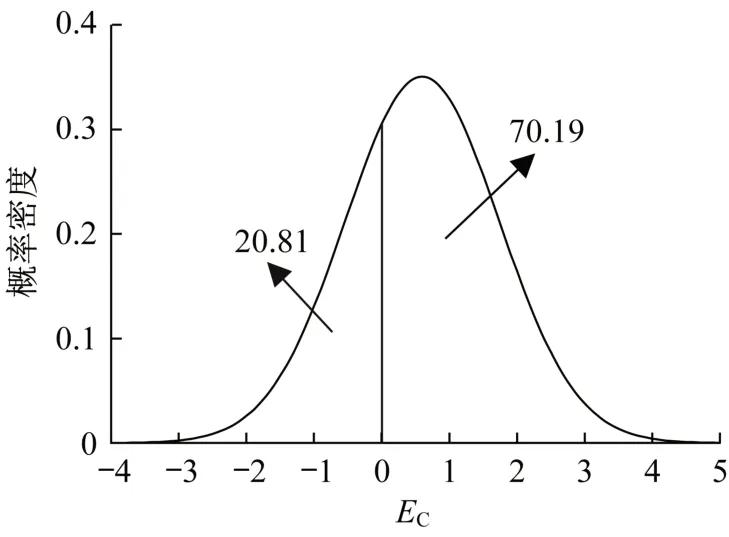
图10 激进型驾驶员变量正态分布Fig.10 Normal distribution of radical driver
本文从山区双车道公路货车影响行为出发,首次提出考虑道路线形和交通流特性的“货车移动遮断”概念,并结合交通波理论和货车移动瓶颈理论构建货车移动遮断效应模型,揭示了山区双车道公路货车移动遮断特性及发生机理。通过无人机高空录像采集货车移动遮断视频数据,提出了综合交通冲突风险和严重度的跟驰风险表征指标,并采用RPORP 构建考虑异质性的小客车跟驰行为风险等级预测模型。主要研究成果如下:
(1)移动遮断是由特殊道路线形,性能差异速度不一的车辆组成一类新的“混合交通”运行中所表现出来的现象,其形成过程减速跟驰(遮断形成)和加速超车(遮断消散)两个阶段,会导致平均行驶速度小于车流整体平均速度,影响交通流稳定性和安全性。
(2)考虑异质性的RP-ORP 模型可以更加准确的拟合货车移动遮断影响下的小客车跟驰行为风险,预测特定条件下跟驰行为在不同风险等级的概率。识别出货车纵向加速度、跟驰车头间距、跟驰持续时间、小客车与货车速度差、激进型驾驶员5个变量显著影响小客车跟驰风险水平,且跟驰持续时间和激进型驾驶员2 个变量具有随机参数特性,对跟驰风险存在异质性效应。
(3)受限于数据采集条件,本文仅从车辆行驶特性和驾驶行为特性研究了货车移动遮断影响下的小客车跟驰行为,后期将设计以道路线形条件为变量的货车移动遮断动态仿真实验,进一步扩展数据样本展开深度研究,优化跟驰风险预测模型的精度和可移植性。下一步将在小客车跟驰行为风险研究的基础上融合超车行为、并道行为风险,综合评估移动遮断下小客车的驾驶行为风险。
作者贡献声明:
谢世坤:数据处理、模型构建、实证分析、结果讨论;
杨轸:研究方法、结果讨论、论文修订;
戢晓峰:总体框架、思路梳理、结果讨论。
猜你喜欢 小客车交通流车道 基于LSTM的沪渝高速公路短时交通流预测研究中国交通信息化(2022年9期)2022-10-28京德高速交通流时空特性数字孪生系统中国交通信息化(2022年5期)2022-07-23基于OpenCV的直道车道线识别技术研究汽车实用技术(2022年5期)2022-04-02北斗+手机实现车道级导航应用卫星应用(2021年11期)2022-01-19避免跟车闯红灯的地面车道线科学大众(2021年9期)2021-07-16北京小客车摇号又创新高3076人抢一个指标新能源汽车报(2020年33期)2020-09-26基于ANFIS混合模型的短时交通流预测①计算机系统应用(2019年6期)2019-07-23全省实行小客车总量调控管理新能源汽车报(2018年18期)2018-05-14斑马线前该如何礼让汽车与安全(2017年7期)2017-09-12基于宏观模型的协作式巡航控制交通流方法汽车文摘(2014年2期)2014-12-14- 上一篇:犬急慢性肾功能衰竭的临床病案分析
- 下一篇:盐锅峡水电站溢流门自动启闭机改造及应用
猜你喜欢
- 2024-01-20 有关于第五次全国经济普查统计重点业务综合培训大会上讲话(完整文档)
- 2024-01-20 “严纪律、转作风、保安全、树形象”专题学习教育活动通知(完整文档)
- 2024-01-20 2024XX区住房城乡建设工作情况汇报
- 2024-01-20 2024高校思政教育交流材料:善用反腐败斗争这堂“大思政课”(精选文档)
- 2024-01-20 2024年主题教育专题党课辅导报告,(4)
- 2024-01-20 关于赴某地学习考察地方立法工作情况报告(范文推荐)
- 2024-01-20 2024年度关于增强党建带团建工作实效对策与建议(精选文档)
- 2024-01-20 教师演讲稿:春风化雨育桃李,,潜心耕耘满芬芳(全文)
- 2024-01-20 主题教育第二阶段来了
- 2024-01-20 2024年度关于到信访局实践锻炼个人总结【完整版】
- 搜索
-
- 打赌输了任人处理作文1000字7篇 05-12
- 当代大学生在全面建设社会主义现代化强 05-12
- 全面建成社会主义现代化强国的战略安排 03-10
- 个人廉洁自律方面存在的问题及整改措施 05-12
- 谈谈青年大学生在中国式现代化征程上的 05-12
- 2022年党支部第一议题会议记录(全文完 11-02
- 作为青年大学生如何肩负时代责任6篇 05-12
- 村党组织建设现状及工作亮点存在问题与 05-12
- 全面从严治党,自我革命重要论述研讨会 05-12
- 产业工人队伍建设改革(全文完整) 10-31
- 11-25国庆70周年庆典晚会 庆典晚会串词
- 11-25办公室礼仪的十大原则 浅谈办公室的电话礼仪
- 01-17用心灵轻轻地歌唱_心灵的歌唱
- 01-17也许你不是我一生的唯一|也许不是我
- 01-17爱了,请珍惜;不爱,趁早放手|爱就珍惜不爱就放手
- 01-17岁月带走的是记忆,但回忆会越来越清晰|有趣又有深意的句子
- 01-17曾经的美好只是曾经,我只想珍惜身边的人|我只想珍惜你
- 01-18从容不惊 [学会笑眼去看世界,不惊不乍,淡定从容]
- 02-03当代大学生学习态度调查报告
- 02-03常用护患英语会话
- 标签列表
