首页 > 心得体会 > 学习材料 / 正文
3D摊铺技术在路面养护工程中的应用探索
2023-03-09 20:10:11 ℃唐建亚
(江苏中路信息科技有限公司,南京 211899)
3D摊铺技术能够基于机械实时三维定位信息与数字化设计模型对比生成基于位置的高程修正信息,并在路面摊铺施工作业中基于对应比例的驱动信号,通过液压阀驱动摊铺机牵引臂液压油缸,使熨平板进行相应方向和数值上的实时调整,从而使摊铺道面根据对应位置设计坡度和高程实时精准变化,同时弥补路面波动变化,实现设计要求的路面平整度和厚度[1]。
虽有上述优点,但3D摊铺的作业条件也有诸多限制,如需要在施工路面两侧布设一定间距的高等级水准点及三维坐标的控制点,保证相邻水准点间的通视[2],而路面养护施工中央分隔带往往导致控制点难以实现通视。基于此,本文通过对路面养护工程摊铺作业的控制需求分析以及对3D摊铺现场控制条件的分析,探索将3D摊铺技术应用在路面养护工程中的可行性。
高速公路的沉降问题通常持续发生在从建设到营运的相当长时间内,其纵坡的变化也是动态、不连续的。因此,通过养护工程改善纵断面线形以提升高速公路的服务水平,是公路养管部门的重点关注内容。为恢复道路的纵面线形,使其满足原工程设计标准要求,在路面养护工程中一般采用铣刨加铺的技术方案。设计单位给出的解决方案一般是长坡的调坡加厚或是局部调坡,但在道路养护施工控制中又会遇到难以找平的问题。
传统的沥青路面摊铺过程中的找平方式主要是通过钢丝线找平基准配合角位位移传感器、非接触式超声波扫描自动找平方式等2D摊铺控制工艺,这种非接触式找平的工作原理主要是基于下基层具有较好的平顺性,但对于需要局部调坡的段落是不适用的。路面养护工程摊铺作业中,受制于作业窗口期短及路肩硬化难以挂钢丝等条件,在封闭的作业区间内需要集中投入力量开展测量放线、基准线架设等工作,投入较大且不易控制养护调坡。因此,在路面养护摊铺作业中,亟须能够减少测量放样工艺、加快施工进度、保证路面施工平顺性的技术手段。
相较于传统的2D找平方式,3D摊铺技术可以通过前期的测量建模,运用计算机辅助设计软件选择高程变坡、路面平整度最佳的数字施工模型。3D摊铺技术不需要挂线找平基准控制,且在施工过程中可以通过对摊铺机械姿态的动态测量控制实现变厚摊铺施工作业,可以减少测量放样、基准线架设等工序,提升作业效率,是路面养护工程摊铺作业较理想的选择。
2.1 3D数字化摊铺技术
当前3D摊铺技术应用的代表有瑞士徕卡PaveSmart 3D摊铺系统、美国拓普康mmGPS 3D摊铺控制系统、美国天宝3D智能摊铺控制系统,3D摊铺的主要工作流程如图1所示。

图1 3D摊铺的主要作业流程
由图1可知,摊铺过程中的“蛙跳”搬站工作是常规2D摊铺找平工作中没有的。施工过程中的检测控制是3D数字化摊铺技术的重要组成部分。其中在高程控制方面,对于路面工程必须达到毫米级,因为路面施工厚度一般不过10 cm,薄层的甚至可能设计为2 cm。而要达到毫米级的控制,必须在施工现场加设光学测量设备,如拓普康mmGPS 3D摊铺控制系统的激光发射器、徕卡PaveSmart 3D和天宝3D智能摊铺中的机器人全站仪,为便于描述,本文称之为光基准站。
在施工过程中,光基准站会持续测量摊铺机的姿态,与建模软件中的设计数据进行对比,并通过数传电台传输至摊铺机的机载控制终端,不断对摊铺机的姿态进行修正。在3D摊铺施工现场必须留下一定净空用于架设光基准站,在施工前期就要通过测量创建施工控制网及平面坐标系统,现场一般用钢钉进行标记,用作光基准站控制点,考虑到其他施工通行车辆、运输车顶升卸料等因素引进的遮挡现象,点间距通常控制在150~200 m[3]。在全站仪方案中,考虑到安装在摊铺机两侧的360°棱镜与光基准站的通视,一般还会在摊铺机的两侧设站,徕卡PaveSmart 3D摊铺现场布置方案如图2所示[4-5]。

图2 徕卡PaveSmart 3D摊铺现场布置方案
2.2 养护工程中3D摊铺技术的实施方案
3D 智能摊铺系统借助多种信号传输方式来完成整套系统的正常引导运作,但是,当光基准站与机载激光接收器之间存在遮挡物时,会直接隔断两者之间的信号传输,长时间的遮挡更会导致摊铺机控制系统成为“瞎子”,摊铺的厚度和平整度将完全失去控制[6],这也是3D摊铺技术现场实施的风险点。
结合路面养护工程的特点,可以得出3D摊铺技术应用在路面养护工程中面临的挑战包括:路面养护施工周期短,因此要求前期测量工作更快完成;
运营公路上可以架设光基准站的空间有限,高速公路中央绿化、路侧标志牌均可能会遮挡光基准站与机载激光接收器。针对如何既将3D摊铺技术用于路面养护工程,同时解决养护工程的作业时间和空间限制对3D摊铺技术应用的制约,本文提出的方案如下:
(1) 应用快速测量建模技术。如用百米或者十米间隔的水准仪进行闭合联测,测量的时间周期必然是较长的,因此可以通过使用无人机携带正射影像进行航测以加速测量过程。另外,也可以尝试应用近年来快速发展的激光点云测量技术,如拓普康的RD-M1 路面扫描仪就可以通过车载正面向下的激光扫描方式采集数百万的点位信息,并直接导入建模软件[7]。
(2) 预先规划好光基准站点位置。在道路封闭或是原路面铣刨前,即需要开始准备测量设站工作,综合考虑道路平曲线、绿化、标志牌和开放车道行车的遮挡影响,以及现场施工中必要的通视距离,规划控制站点位置。同时,由于全站仪或激光发射器均需要稳定的基础以形成绝对的水准,站点位置还需要一定的强度基础,松软的绿化土是不合适的。
3.1 试验路概况
为探索路面养护工程应用3D摊铺技术的可行性,2020年9月在江苏省S49新扬高速新扬方向K47+100~K47+370段实施了3D摊铺试验段工程。原路面的病害主要是路面车辙病害,养护技术方案是行车道的铣刨重铺。试验路所用的3D摊铺设备为瑞士徕卡PaveSmart 3D摊铺系统,试验路为单车道养护施工。
3.2 试验路铺筑过程
3.2.1 测量建模工作
“仓廪实,天下安”,粮食是国家治国安邦的根本。耕地更是保障粮食生产的重要前提与保障,而土地整治是补充耕地最直接有效的途径,是推进乡村振兴的有力手段。为保证耕地数量的同时保障耕地质量,在土地整治开发建设过程中,土壤环境质量动态监测、土地利用科学规划及整治中各类信息收集分析存储,是当前一定时期内土地整治管理过程中的重要工作。同时,随着计算机科学技术的发展以及大数据时代的到来,科技创新与信息技术发展息息相关,在土地整治中也得到了较多的应用,极大地提高了土地整治各阶段的效率。本文介绍了信息化技术在土地整治工程中的应用,旨在推广信息化技术的同时,提高土地整治质量,构建生态和谐土地。
确定试验段后,对K47+100~K47+370段行车道进行铣刨,铣刨完成前后,现场分别对原地面、铣刨面进行高程测量,测量间距为10 m。为数据化地表达道路的平顺性,采用两点设计与实际标高差相减后除以两点间距离的公式计算道路平顺性。从高程测量数据及平顺性计算结果来看,原地面的线形总体平顺。原路面的高程测量数据如图3所示,原路面的平顺性检测结果如图4所示。
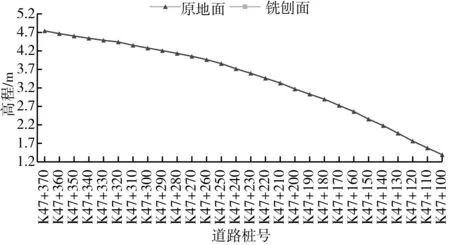
图3 原路面的高程测量数据

图4 原路面的平顺性检测结果
将原路面测量数据导入ICON三维建模软件,考虑到本次仅维修一个车道,为避免因台阶造成道路安全隐患,在三维建模中以贴近原地面的原则进行设计,建模完成后将设计数据导入机载控制电脑。
3.2.2 机械设备配置
根据现场单车道施工的实际作业条件,使用两台机器人全站仪对摊铺机的姿态进行控制,其中一台机器人全站仪进行摊铺后的数据检测。摊铺机械上配置360°棱镜,用于机器人全站仪对摊铺机姿态数据的跟踪。运用无人机在施工现场进行大范围的航测以选定具体设站的位置,根据现场的条件,为防止第一车道通行车辆对测量造成遮挡干扰,将两台跟踪全站仪布置在砌石边坡上,将测量全站仪设置在硬路肩上。试验路现场机械设备配置如图5所示,全自动全站仪跟踪摊铺机姿态如图6所示。

图5 试验路现场机械设备配置

图6 全自动全站仪跟踪摊铺机姿态
3.2.3 施工过程
现场施工中,首先对摊铺机姿态(包括熨平板两端位置和提升液压缸位置)进行校准,获得摊铺初始姿态数据。
在校准工作完成后,现场摊铺机械正常施工,摊铺机不需要配置滑靴等找平装置,施工中由机载控制电脑根据三维建模数据、摊铺机械姿态数据控制熨平板的提升、横坡。试验段当天施工除起步约5 m范围内需要人工补料修正厚度外,后续段落均可由机械设备自动工作,无须人为干预。

图7 现场机载控制电脑显示的实际与设计高程之差
试验路完成后,分别从测量高程、路面平整度和厚度的角度开展试验检测工作,以检验3D摊铺在路面养护工程中应用的可行性。
4.1 高程测量数据
在施工完成后对道路进行沿线高程测量,对比设计数据与现场施工数据。从高程测量数据来看,施工碾压后的数据与设计数据基本相符,也与现场机载控制电脑显示结果吻合。道路高程数据测量(设计已考虑松铺)如图8所示。

图8 道路高程数据测量(设计已考虑松铺)
4.2 路面平整度与厚度数据
在施工完成后第二天,进行现场路面检测,对3D摊铺中较为关键的厚度、平整度数据进行现场检测。采用钻芯法检测厚度,对相应位置的芯样厚度与设计厚度数据(设计面与铣刨面差值)进行对比,数据吻合性较好。因条件限制,路面平整度采用3 m直尺进行检测,满足规范要求。路面芯样厚度检测结果如图9所示,路面平整度检测结果如图10所示。

图9 路面芯样厚度检测结果

图10 路面平整度检测结果
该试验路通车一年后,跟踪观测显示各项路表性能指标正常。
综上,本文在详细分析路面养护工程的需求及3D摊铺作业流程后,铺筑试验路以进一步论证3D摊铺技术在路面养护工程中应用的可行性。根据施工过程中的控制数据、检测结果以及通车一年后的运营表现可知,本次试验是成功的。
3D摊铺技术是测量定位、机械控制和工程施工等诸多领域的技术融合,符合当前各行业数字转型的发展趋势。通过分析路面养护工程应用3D摊铺技术工艺过程中的方案设计、试验路铺筑和检测数据,得出以下结论:
(1) 通过分析3D摊铺技术的特点,结合路面养护的实际条件进行针对性的方案设计以及施工组织中的动态化措施调整,将3D摊铺技术应用于路面养护工程是可行的。
(2) 路面养护工程应用3D摊铺技术的难点在于确定光基准站点位置,通过试验路的铺筑,总结应在道路封闭或是路面养护铣刨前准备此项工作,将光基准站点架设于硬路肩、砌石边坡上,以保证光基准站良好的通视性。
(3) 总结试验路的铺筑过程可知,3D摊铺技术无须基准挂线、安装平衡梁,施工中应用三维测量数据对机械姿态实现动态调整,解决了养护工程难以基准挂线的困难。
(4) 试验路铺筑过程检测数据表明,3D摊铺施工过程实际控制高程与设计值之差基本在±3 mm以内,路面平整度良好。针对路面养护工程中的道路平顺性问题,3D摊铺技术是较佳的解决方案。
猜你喜欢 摊铺机基准摊铺 国道320线上高墨山至万载段(宜万同城)改建工程开始沥青上面层摊铺施工石油沥青(2022年4期)2022-09-03环氧水磨石湿法摊铺与干法摊铺的对比石材(2022年2期)2022-05-25下期要目化工设计(2020年6期)2020-01-13应如何确定行政处罚裁量基准劳动保护(2018年8期)2018-09-12单机全幅摊铺在广乐高速LM5标的应用研究筑路机械与施工机械化(2015年11期)2015-07-01如何让你的摊铺业务获得增长筑路机械与施工机械化(2015年11期)2015-07-01滑落还是攀爬读者·校园版(2015年7期)2015-05-14燃气轮机燃烧基准温度估算方法燃气轮机技术(2014年4期)2014-04-16SRP90S多功能伸缩摊铺机筑路机械与施工机械化(2014年8期)2014-03-01我国压路机、摊铺机市场近况简报筑路机械与施工机械化(2014年5期)2014-03-01- 上一篇:不同焊接方法对E690海工钢气孔规律的影响
- 下一篇:刹车盘柔性制造生产线的仿真优化
猜你喜欢
- 2024-01-20 有关于第五次全国经济普查统计重点业务综合培训大会上讲话(完整文档)
- 2024-01-20 “严纪律、转作风、保安全、树形象”专题学习教育活动通知(完整文档)
- 2024-01-20 2024XX区住房城乡建设工作情况汇报
- 2024-01-20 2024高校思政教育交流材料:善用反腐败斗争这堂“大思政课”(精选文档)
- 2024-01-20 2024年主题教育专题党课辅导报告,(4)
- 2024-01-20 关于赴某地学习考察地方立法工作情况报告(范文推荐)
- 2024-01-20 2024年度关于增强党建带团建工作实效对策与建议(精选文档)
- 2024-01-20 教师演讲稿:春风化雨育桃李,,潜心耕耘满芬芳(全文)
- 2024-01-20 主题教育第二阶段来了
- 2024-01-20 2024年度关于到信访局实践锻炼个人总结【完整版】
- 搜索
-
- 打赌输了任人处理作文1000字7篇 05-12
- 当代大学生在全面建设社会主义现代化强 05-12
- 全面建成社会主义现代化强国的战略安排 03-10
- 个人廉洁自律方面存在的问题及整改措施 05-12
- 谈谈青年大学生在中国式现代化征程上的 05-12
- 2022年党支部第一议题会议记录(全文完 11-02
- 作为青年大学生如何肩负时代责任6篇 05-12
- 村党组织建设现状及工作亮点存在问题与 05-12
- 全面从严治党,自我革命重要论述研讨会 05-12
- 产业工人队伍建设改革(全文完整) 10-31
- 11-25国庆70周年庆典晚会 庆典晚会串词
- 11-25办公室礼仪的十大原则 浅谈办公室的电话礼仪
- 01-17用心灵轻轻地歌唱_心灵的歌唱
- 01-17也许你不是我一生的唯一|也许不是我
- 01-17爱了,请珍惜;不爱,趁早放手|爱就珍惜不爱就放手
- 01-17岁月带走的是记忆,但回忆会越来越清晰|有趣又有深意的句子
- 01-17曾经的美好只是曾经,我只想珍惜身边的人|我只想珍惜你
- 01-18从容不惊 [学会笑眼去看世界,不惊不乍,淡定从容]
- 02-03当代大学生学习态度调查报告
- 02-03常用护患英语会话
- 标签列表
