首页 > 心得体会 > 学习材料 / 正文
考虑位姿约束的舰载机舰面路径规划方法∗
2023-03-17 17:00:20 ℃黄 葵 韩啸华 朱兴动 赵火箭
(1.海军航空大学青岛校区 青岛 266000)(2.海军航空大学 烟台 264001)(3.91197部队 青岛 266000)
航母是名副其实的海上霸主。作为其主要作战武器的舰载机更是航母战斗力的重要体现,其在甲板上的转运方式更是直接影响到舰载机综合出动能力[1~2]。在飞行甲板上,舰载机需要在障碍密集的环境中进行出动准备和着舰回收。因此,设计出一种合适的路径规划方法,是确保舰载机在甲板上高效转运的基础。目前,舰载机舰面转运的相关研究主要运用了机器人等领域的理论[2~6]。
刘洁等[7]将舰载机调运模式的轨迹规划问题转化为时间-能量混合最优问题,设计了保辛伪谱方法进行求解。薛均晓等[8]基于智能体状态和动作空间对航母甲板场景进行建模,并构造了环境预测深度Q网络进行求解。司维超等[9]针对舰载机路径规划问题,建立了飞行甲板、实体姿态、路径平滑等数学模型,并设计了多生境并行混沌算法进行求解。上述方法虽有效解决了舰载机路径规划问题,但并未考虑舰载机转运过程中的位姿约束问题,对特定位姿下的转运问题需要考虑到航向等因素。
在考虑位姿约束的情况下,Dubins L E等[10]提出了基于几何法求解最短路径的Dubins曲线,该曲线能够找到一条从起始点到目标点的最短距离,并且满足转弯半径和初始相对位置,但其限制目标只能向前行进。J.A Reeds等[11]提出了ReedsSheep曲线,该曲线在Dubins曲线的基础上,将反向运动加入到了规划中,使得在某些情况下可以得出更优的解。上述曲线在无障碍环境中能够有效地规划出路径,但在障碍密集的环境中,需要考虑避碰问题。张智等[12]在遗传算法的基础上,针对性的对ReedsSheep曲线的三段路径进行编码,通过设定两个中间节点进行求解,算法收敛速度较快,但局限性较大。
本文参考ReedsSheep曲线中的规划思想,将舰载机的运动状态引入到节点的搜索方式中,并设计出满足舰载机非完整性约束的启发函数。仿真结果表明,该方法能够有效解决带有位姿约束的舰载机舰面路径规划问题。
2.1 轮廓模型
在甲板转运过程中,舰载机需要根据任务要求在展翼和收翼状态中进行切换,因此本文对舰载机的两种状态进行轮廓描述。为了降低模型复杂度,在包含舰载机轮廓且不损失较多有效空间的前提下,引入多边形线段集来进行描述,如图1所示。
2.2 碰撞模型
实现舰载机的碰撞检测需计算舰载机之间的安全距离,被多边形线段集描述后的舰载机形状为凸多边形,故问题实质转化为求解凸多边形间的最小距离,即求解两条线段之间的距离。给定两个非连接的凸多边形P和Q,本文按照如下步骤来推导凸多边形间最短距离,示意图如图2所示。

图2 碰撞距离检测
步骤1 通过线段P1P2向量与线段Q1Q2向量的叉乘来判断线段是否相交,若不相交则继续。
步骤2 计算线段端点之间的距离,分别计算dP1_Q1、dP1_Q2、dP2_Q1和 dP2_Q2,以 dP1_Q1为例,计算公式如下:

步骤3 计算线段端点到线段之间的直线距离,需计算出垂足坐标,计算公式如下:
步骤4 求得垂足坐标后,需判断该点是否在其线段上,判断公式如下:

若满足上述关系式,则线段端点在该条线段上,所计算距离为有效距离。
2.3 运动学模型
在一般的路径规划问题上,运动学模型仅考虑研究对象的构型空间。甲板上的舰载机和牵引车属于典型的非完整约束系统,在该类问题中,通常需要考虑研究对象的非完整约束。
舰载机在舰面转运时通常有单机滑行、离轴无杆牵引、离轴有杆牵引三种调运模式,由于本文主要对路径规划算法进行研究,故采取较为简单的单机滑行调运模式,运动学模型如图3所示。

图3 舰载机滑行运动模型
舰载机的位姿用构型描述[13]。使用一个固定在甲板环境中的惯性坐标系,构型可以表示为一个构型向量,表达式为

其中,(x ,y)是舰载机后轮中心的位置;
θ是舰载机的航向角。对时间求导,则速度可以表示为速度向量,表达式为

其中,各变量表示如下式:

其中,L为舰载机前后轮轮距;
φ为舰载机转向角,规定角度逆时针为正,顺时针为负。
由于舰载机在转运过程中受轮式结构的限制,其转运半径受到限制,故对转向角进行约束:

其中,φmax为转向角的最大值。
3.1 节点扩展
在智能规划算法中,节点以离散的方式进行搜索,而在舰载机转运过程中需要考虑到运动学约束,因此通过使用一组预先计算的运动基元来确定可达状态。
ReedsSheep曲线指出,在任意的起始状态下和终止状态之间都存在由几段半径固定的圆弧和一段直线段拼接而成的曲线,且圆弧的半径为目标的最小转向半径,目标不仅可以朝前移动,也可以向后移动,示意图如图4所示。
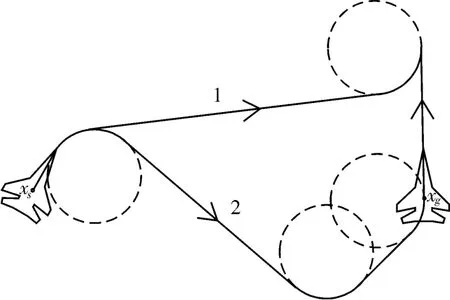
图4 ReedsSheep曲线示意图
图中展示舰载机从初始位置xs到目标位置xg的两条路径,图中虚线圆代表舰载机的转弯弧。在网格精度一致的前提下,使用四类运动基元:最大右转、最大左转、前进和后退来生成路径,改变行驶方向会产生额外代价,子节点位置则根据舰载机的最小转弯半径以及节点长度确定。对子节点进行碰撞检测,无碰撞路径的节点会加入到搜索树。随着不断扩展,若新节点落入某个节点已经占用的单元格,则比较新旧节点的成本,成本较高的节点会被删除,直到搜索到目标单元格,通过运动状态生成的路径能够有效解决舰载机运动学约束,改进后的节点搜索方式如图5所示。

图5 节点扩展方式
满足舰载机运动学约束的运动基元必须满足以下条件:
1)驱动距离必须大于当前单元格大小。
2)运动曲率受舰载机最大转向角的限制。
3)航向角的变化必须是连续空间中航向维度变化的倍数。
3.2 启发函数
搜索算法中的启发函数用来计算任何节点到目标节点的最小代价评估值,选取不同的启发函数可以得到最短路径或最快路径,因此本文主要建立两个启发函数。
1)有障碍物的完整性约束启发函数
该启发函数主要考虑环境中的障碍物信息,忽略舰载机的非完整性约束,如图6所示。计算在每个节点上到目标节点的最近距离,并将其作为代价函数h1(n)的值。由于能够获得当前位置到目标位置的最短路径,因此解决了的朝向问题。

图6 有障碍物的完整性启发
2)无障碍物的非完整性约束启发函数
该启发函数主要考虑舰载机的非完整性约束,忽略环境中的障碍物信息,如图7所示。将舰载机的最小转弯半径作为输入,计算从起点(xs,ys,θs)到达目标点(xg,yg,θg)的Reed-Sheep曲线值,将其作为代价函数h2(n)的值。由于该项代价函数可以修剪搜索节点的分支,解决了舰载机到达目标点时路径方向与目标方向不一致的问题。
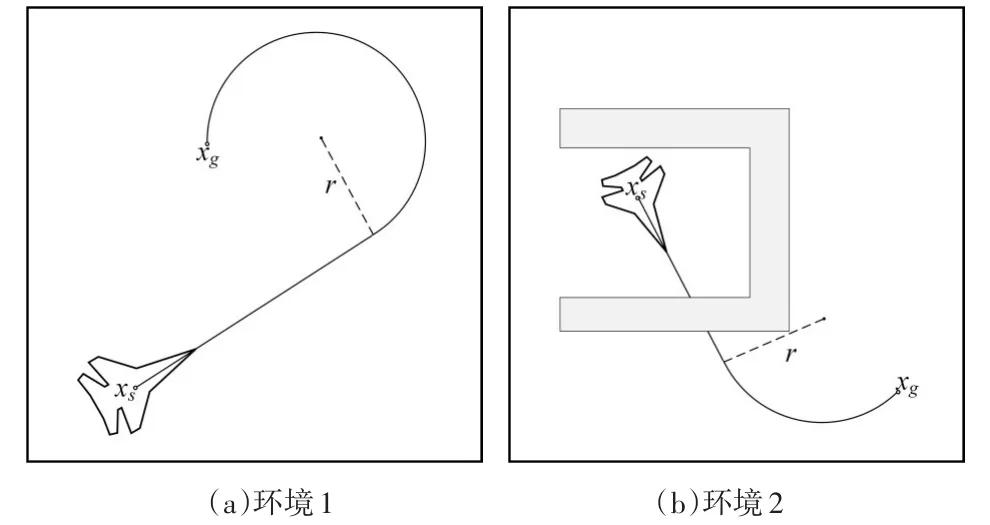
图7 无障碍物的非完整性约束启发代价
由于这两种启发函数解决了路径规划中的不同问题,因此对于任何给定的状态,选择这两个函数中最大的值作为启发函数h(n),其表达式为

为验证本文方法的可行性,本文结合具体算例进行实验分析,具体的计算环境如下:Win 7 64 bit,Visual Studio 2015,c#编程语言。设定舰载机的速度匀速为1m/s,最大转向角为0.9rad,前后轮距为7m。
随机布放四组舰面环境,并兼顾正向和逆向转运。第一组初末位姿分别为(59,177,1.32)、(577,146,1.57),并对第二组初末位姿分别为(73,217,0.78)、(696,197,1.57),第三组初末位姿分别为(119,219,0.52)、(361,201,0.78),第四组初末位姿分别为(491,234,0)、(247,100,2.27)。仿真图如图8~11所示,其中路径轨迹为虚线的为采用R-S曲线进行仿真,路径轨迹为实线的为采用改进后方法进行仿真。

图8 案例1

图9 案例2

图10 案例3

图11 案例4
在图8~11四组案例中,前两种案例舰面布放数量较少,后两种案例布放数量较多,但两种方法均能快速规划出路径,在时间上无较大差别,所以主要从路径合理性上进行分析。
在第一种和第二种案例中,新方法规划的路径更为平滑。在第三种案例中,由于转运路径较长,新路径在转向处规划的路径更短。在第四种案例中,由于障碍布放较为密集,原方法所采用的转向角度无法直接避开,需倒退再前进,而新方法可以直接规划出合适路径。
可以看出在上述四种方法中,新方法规划出的路径较为顺滑,更加符合真实转运要求。而通过旧方法进行规划时,由于舰面舰载机布放较为复杂,往往需要设置多个中间节点才能规划出有效路径,因此该方法适合解决小范围内的位姿约束问题,而本文改进的方法能够根据启发函数选择成本较低的航向进行规划,无需设置中间节点,较旧方法更快、更合理,满足大范围下的路径规划要求。
本文针对复杂环境下的舰载机舰面精确转运问题,提出了一种大范围考虑位姿约束的全局路径规划方法。本文构建了以舰载机运动学状态为基础的节点搜索方式,并设计出了满足非完整性约束的启发函数。仿真结果表明,本文所设计的方法能有效解决舰载机单机滑行下的路径规划问题。
此外,舰面转运是一个多维度的综合调度问题,至此作者已对舰载机牵引系统全局转运、局部避碰进行了研究,接下来将对资源优化配置,甲板布位继续深入研究。
猜你喜欢 位姿线段约束 融合二维图像和三维点云的相机位姿估计光学精密工程(2022年22期)2022-11-28画出线段图来比较小学生学习指导(高年级)(2021年5期)2021-05-18船舶清理机器人定位基准位姿测量技术研究浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19约束离散KP方程族的完全Virasoro对称数学年刊A辑(中文版)(2020年1期)2020-05-19优化ORB 特征的视觉SLAM电子技术与软件工程(2019年6期)2019-04-26怎样画线段图小学生学习指导(低年级)(2019年3期)2019-04-22我们一起数线段小学生学习指导(低年级)(2019年4期)2019-04-22数线段小学生学习指导(低年级)(2018年12期)2018-12-29适当放手能让孩子更好地自我约束人生十六七(2015年6期)2015-02-28基于几何特征的快速位姿识别算法研究组合机床与自动化加工技术(2014年12期)2014-03-01- 上一篇:美军网络安全试验鉴定研究∗
- 下一篇:模块化空间可展开天线支撑桁架结构的热-结构分析
猜你喜欢
- 2024-01-20 有关于第五次全国经济普查统计重点业务综合培训大会上讲话(完整文档)
- 2024-01-20 “严纪律、转作风、保安全、树形象”专题学习教育活动通知(完整文档)
- 2024-01-20 2024XX区住房城乡建设工作情况汇报
- 2024-01-20 2024高校思政教育交流材料:善用反腐败斗争这堂“大思政课”(精选文档)
- 2024-01-20 2024年主题教育专题党课辅导报告,(4)
- 2024-01-20 关于赴某地学习考察地方立法工作情况报告(范文推荐)
- 2024-01-20 2024年度关于增强党建带团建工作实效对策与建议(精选文档)
- 2024-01-20 教师演讲稿:春风化雨育桃李,,潜心耕耘满芬芳(全文)
- 2024-01-20 主题教育第二阶段来了
- 2024-01-20 2024年度关于到信访局实践锻炼个人总结【完整版】
- 搜索
-
- 打赌输了任人处理作文1000字7篇 05-12
- 当代大学生在全面建设社会主义现代化强 05-12
- 全面建成社会主义现代化强国的战略安排 03-10
- 个人廉洁自律方面存在的问题及整改措施 05-12
- 谈谈青年大学生在中国式现代化征程上的 05-12
- 2022年党支部第一议题会议记录(全文完 11-02
- 作为青年大学生如何肩负时代责任6篇 05-12
- 村党组织建设现状及工作亮点存在问题与 05-12
- 全面从严治党,自我革命重要论述研讨会 05-12
- 产业工人队伍建设改革(全文完整) 10-31
- 11-25国庆70周年庆典晚会 庆典晚会串词
- 11-25办公室礼仪的十大原则 浅谈办公室的电话礼仪
- 01-17用心灵轻轻地歌唱_心灵的歌唱
- 01-17也许你不是我一生的唯一|也许不是我
- 01-17爱了,请珍惜;不爱,趁早放手|爱就珍惜不爱就放手
- 01-17岁月带走的是记忆,但回忆会越来越清晰|有趣又有深意的句子
- 01-17曾经的美好只是曾经,我只想珍惜身边的人|我只想珍惜你
- 01-18从容不惊 [学会笑眼去看世界,不惊不乍,淡定从容]
- 02-03当代大学生学习态度调查报告
- 02-03常用护患英语会话
- 标签列表
