首页 > 心得体会 > 学习材料 / 正文
基于车云协同的露天矿山数字地图更新方法
2023-05-04 08:25:13 ℃李浩然,张 利,陆 鑫,王晓伟,3,欧阳文杰,秦洪懋,3
(1.湖南大学 机械与运载工程学院,湖南 长沙 410082;
2.东风悦享科技有限公司,湖北 武汉 430056;
3.湖南大学 无锡智能控制研究院,江苏 无锡 214115)
近年来,随着汽车行业的变革,自动驾驶技术正处于快速发展阶段。与在开放场景下相比,自动驾驶技术在封闭场景下受环境干扰更小,使用范围更广,运行效率和安全性更高[1]。露天矿山是典型的封闭场景,具备封闭无人、线路固定、低速和点对点等特点,是自动驾驶技术运用的最佳场景之一。高精数字地图是实现露天矿山自动驾驶必不可少的组成部分,其将现实环境进行厘米级精度的虚拟呈现,为车辆提供超视距感知,以保证自动驾驶的安全性和可靠性[2]。无人作业车辆通过高精数字地图获得详细的道路信息、规则信息与实时信息,从而完成环境感知、路径规划与车载定位等功能[3-4]。在自动驾驶车辆工作过程中,矿石开采与废土堆积使得区域边界发生变化,如果没有及时更新地图,将会影响作业进程。因此,地图更新的准确性与实时性对于提高矿山无人作业效率和安全性具有重要意义。
目前,国内外针对高精数字地图的更新方法已经有许多研究。传统地图的结构分为道路层和路网层[5-6],文献[7]针对传统电子地图内容不够丰富的局限性,提出了一种七层无人驾驶地图结构模型。然而,露天矿山地形复杂,无明显的道路特征,现有面向露天矿山的地图系统存在地图要素冗余或缺失问题,难以保证露天矿山地图更新的完整性。文献[8-9]采用滤波融合方法,在估计车辆位置的同时更新地图状态,使得在真实环境发生微小变化时,地图元素能够更快地接近真实值。文献[10]在模拟工厂环境中以视觉方式检测目标,并根据环境确定其位置,实现了预定标志添加或移除的地图更新。文献[11]使用众包数据和高清地图中的地标信息,通过不确定性信息,选择可靠的观测数据进行地图更新。文献[1]提出了一种非铺装场景通用的方法,介绍了一种轻量化高精数字地图,灵活高效地为自动驾驶提供支持。但车辆计算资源有限,导致地图数据处理效率低[12]。总的来说,现有高精数字地图系统与更新方法成本高、数据量大、更新周期长,难以满足露天矿山场景下的地图完整性、地图鲜度等要求。
车云协同技术可整合车载端和云端通信、计算、存储的资源,依靠云端可扩展性、高灵活性、高可靠性等优势,完成车辆与云端实时信息交互,进而提高地图更新效率[13]。为此,本文考虑自动驾驶对地图的需求,分析露天矿山作业环境,构建了三层(静态层、准动态层和动态层)地图模型;
针对露天矿山常见的地图更新问题(包括边界扩展、道路添加和道路删除),提出了相应的地图更新方法;
设计了一种基于车云协同的地图更新系统,以保证露天矿山自动驾驶车辆地图的鲜度。
本节在分析自动驾驶对数字地图要素的需求及露天矿山作业环境的基础上,建立了一种三层地图模型结构。
1.1 地图要素与环境分析
露天矿山自动驾驶技术需要多方面地图要素的信息支持。其中,定位功能依赖于边界信息,路径规划功能依赖于路网信息,协同作业依赖于作业点信息,调度功能依赖于区域信息,应急处理依赖于电子围栏信息。
不同于城市结构化道路,露天矿山为典型的非结构化道路。首先,区域边界不规则,没有确定边界;
其次,道路较固定,路网较简单,无明显道路特征,且交叉路口不规则;
最后,由于矿石开采与堆积,导致作业边界杂乱,作业点频繁变化。因此,根据地图要素信息更新频率将露天矿山地图模型分为3层:静态层、准动态层和动态层,如图1所示。
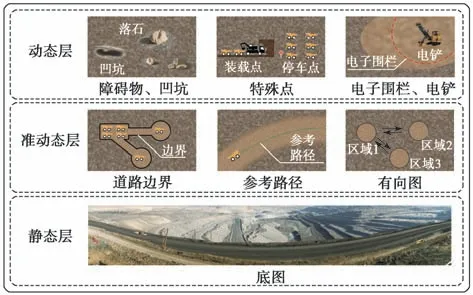
图1 露天矿山三层地图模型结构Fig.1 Three-layer map model of open-pit mine
1.2 三层地图模型结构
静态层主要由矿区俯视图构成,作为底图对目标场景状态进行展示,该层一般无须变动。准动态层的数据更新频率较低,该层包含了道路边界、停车场区域边界、路口边界、参考路径和有向图等要素。边界要素包括了其区域的外轮廓数据点。道路区域上的路径相对固定,存储这些固定的路径作为参考路径,可通过路径搜索快速获得该道路上的轨迹,从而缩短路径规划的时间。有向图要素包含了区域之间的连通关系和距离,通过有向图的搜索可以得到最优的路线方案。动态层包含了装卸载区边界、特殊点、障碍物和凹坑、电铲位置和电子围栏等要素。由于矿石和废土的开采与堆积,该层地图数据变化频率和更新实时性要求较高。在每个区域中可能包含入口点、排队点、倒车点、工作点和出口点等特殊点。由于自然和人为要素,区域中可能会出现障碍物或凹坑,这些要素可能会影响路径规划,所以将感知到的障碍物和凹坑数据也储存在动态层。
2.1 地图表示
本文自定义了地图模型来表示露天矿山的场景。图2(a)为无人作业车辆在露天矿山场景中行驶所提供的大量重要且详细的信息,其基本要素包括区域和道路。其中,区域包括作业区、停车场、道路(包含中心线和车道)和路口区域。基于实际需求,本研究在OpenDrive标准的基础上做了一些修改和扩展[14]。所有地图信息以表的形式存储到关系型数据库中,以便于查询和管理地图数据。

图2 地图表示示意Fig.2 Schematic diagram of map representation
对于区域间的联通关系,本文给出如图2(b)所示的有向图G={V,(E,W)},主要用于路径规划。其中,V={V1,V2,……,Vn}是一组顶点,表示如路口、工作区等区域,n是区域数量;
E={E1,E2,…,Em}是一组边,表示这些区域之间的路径,m是路径数量;
W={W1,W2,…,Wm}是一组权重,表示道路中心线的长度。有向图G是一个n×n的二维数组,因为大部分区域不存在连通关系,所以大部分元素为空。因此,在数据库中,有向图以稀疏矩阵形式将其压缩存储,记录起始节点、终止节点和权值信息。
2.2 地图更新
随着矿山的不断开采,区域不断变化,数字地图往往与实际环境不匹配。因此,随着作业的进行,地图必须及时更新。否则,将影响采矿项目的效率和安全性。车载端收到更新信号后,根据场景选择不同的更新方法,将更新后的数据发送至云端数据库完成更新。本文针对准动态层元素关注三种最典型更新情景:区域边界扩展、道路添加和道路删除。
2.2.1 边界扩展
在边界扩展场景中,最重要的问题是如何推断新边界以及如何合并新旧边界。
边界扩展的示例如图3所示。图中,黑点是车辆行驶轨迹点;
红点是由于信号波动而导致的异常轨迹点;
L1是旧边界,L2是推算出来的新边界;
位于旧边界内的点由蓝色区域标识;
位于新边界内的正常轨迹点由绿色区域标识。

图3 工作区域边界扩展Fig.3 Boundary extension of working area
边界扩展算法的输入:(1)轨迹集TS={T1,T2,T3,…,Tj};
(2)现有地图M;
(3)矩阵数量l和理论最大距离dmax。
边界扩展算法的输出:新地图M"。
边界扩展算法的伪代码如表1所示。

表1 边界扩展算法Tab.1 Algorithm of boundary expansion
由于数据中心存在异常点,因此首先对轨迹点进行去噪。利用连续两点间的理论距离d和实际距离d"进行判断。理论距离计算表达式为

式中:v——数据采集车辆轨迹点记录的速度;
t——数据采集的时间间隔,由相邻轨迹点附带的时间戳差值得到。
理论距离的110%被设为理论最大距离dmax。实际距离d"为连读两点的欧氏距离。当实际距离大于理论最大距离时,则认为该点为异常点,并移除该点(表1第1~10行)。异常点去除后得到轨迹集TS",计算轨迹与L1的所有交点,选择第一个交点和最后一个交点作为P1和Pl。基于线段构建局部坐标系XOY,并以P1作为原点。矢量方向为x轴。将轨迹点进行坐标转化,从大地UTM坐标系转换为局部坐标系。把等分l份来构造矩形,l是可调节的,并且l越大,新边界越准确。矩形的高度为h,略大于所有坐标点的y值。根据它们的x值对这些点进行分组,若P1点的x值在(x0,x1)范围内,将点P1放入矩形Rx0x1中。因此,基于所有坐标点的x值,可以将其放到相应的矩形(Rx0x1,Rx1x2,……,Rx(l-1)xl)中(表1第11~13行)。每个矩形中最大偏移点的y值为矩形高度,并根据这些代表点构建新边框L2(表1第14~18行)。最后,在旧边界中删除P1和Pl之间的边界点L1,同时将推断出的新边界L2合并到地图M中,最终得到地图M"(表1第19~20行)。
2.2.2 道路添加
在封闭区域,原有的交通道路可能会因为雨、雪等天气条件而出现巨大的水坑甚至路基塌陷,导致需要修建新的道路。此时,需要收集正在建设新道路的工程机械(包括压路机和推土机)的轨迹数据,并推断出新的道路边界和道路中心线。在这个场景中,需要同时添加道路边界层和有向图层。
2.2.2.1 道路更新
图4示出了道路添加的示例,其中,图4(a)表示原始道路,图4(b)表示更新后的地图。新道路的边界线和中心线分别用红实线和红虚线表示。增加一条新道路后,在原始道路和更新道路的交点处有一个新的路口。

图4 道路添加Fig.4 Road addition
道路添加算法的输入:(1)轨迹集TS={T1,T2,T3,…,Tj};
(2)现有地图M。
道路添加算法的输出:新地图M"。
道路添加算法伪代码见表2。

表2 道路添加算法Tab.2 Algorithm of road addition
获得两个交点P1和P2的方法及推断新道路左右边界的原理(表2第1~3行)类似于在2.2.1节中提出的边界扩展算法,在此不再赘述。
在获得新的道路边界后,使用中心线提取法[14]推断新的道路中心线(表2第4行)。然后,经过点P1和P2构建一条原始道路边界的垂线来推断路口边界,并连接P1和P2,使它们与旧边界相交并形成路口的三条边界(表2第5行)。最后,删除原始道路边界(表2第6行),以及新路口中的原始道路中心线。因此,原始道路被分为两条不同的道路。
2.2.2.2 有向图更新
在V1和V2之间添加一条道路后,需要在有向图中添加2个顶点V3和V4,以及3组边与权重(E,W),分别是(e2,w2)与(e'2,w'2)、(e3,w3)与(e'3,w'3)、(e4,w4)与(e'4,w'4);
同时,需要计算新边的长度。至此,完成了道路添加场景中的所有更新,如图5所示。

图5 道路添加有向图变化Fig.5 Digraph changes caused by adding roads
2.2.3 道路删除
在封闭区域,随着作业推进,区域可能会被废弃。在这个场景中,目标是在区域边界层中移除需要删除的道路,然后在有向图层中移除相应的顶点和有向边。

图6 道路删除Fig.6 Road deletion
道路删除算法的输入:(1)删除道路2;
(2)现有地图M。
道路删除算法的输出:新地图M"。
道路删除算法的伪代码见表3。

表3 道路删除算法的伪代码Tab.3 Pseudocode of the algorithm for road removal
更新静态地图的4个关键步骤如下:(1)定位删除道路2的初始点P1、P2(表3第1行);
(2)构造一条闭合线来闭合路口(表3第2行);
(3)将闭合线合并到现有地图M(表3第3行);
(4)找到所有属于道路2的点,通过删除其两个边界和中心线的点来移除道路(表3第4~5行)。
除了更新区域边界外,有向图还必须删除2个顶点V2和V3,以及3组边与权重(E,W)。同时添加新的(e5,w5)与(e'5,w'5),进而完成道路网络更新,如图7所示。

图7 道路删除有向图变化示意图Fig.7 Digraph changes caused by deleting roads
3.1 系统方案
在露天矿山场景下,地图采集数据量较大,更新流程复杂,单纯依靠车辆计算资源难以进一步提高地图更新效率。一般来说,地图更新是对本地保存的原始地图数据进行裁剪、拼接等操作,需要较大的存储空间和算力。另外,单车地图更新的非共享模式,将导致每辆车的重复更新操作,浪费计算资源,更新效率很低。在这种情况下,车辆通过无线链路将更新数据传输到云中心,实现更新数据共享与同步更新,从而提高了地图更新效率。
3.2 系统架构
基于车云协同的地图更新系统主要由车载端和云端两部分组成。车载端由定位模块、地图数据预处理模块、通信模块组成。云端由网关模块、地图更新服务、地图数据库组成,系统结构如图8所示。

图8 基于车云协同的地图更新系统Fig.8 Map updating system based on vehicle-cloud collaboration
车载端定位模块负责收集车载端工作时的位置信息,根据位置信息得到轨迹数据,从而得到地图更新的原始数据;
数据预处理模块负责将定位模块收集的原始轨迹数据进行预处理,包括轨迹点滤波、异常点剔除等,从而提高数据的可靠性;
通信模块负责将车辆提供的状态数据和地图预处理数据上传至云端,同时接收云端下发的地图更新数据、路径规划数据、任务信息等,并将数据转发给其他模块使用。
云端网关模块负责解析车辆上报的状态信息和轨迹信息;
地图更新模块负责对地图数据进行处理,使用本文所提的地图更新方法来识别地图特征的变化,并将这些变化对应到相应的地图更新类型中,操作数据库实现地图数据的更新;
地图数据存储在关系型数据库中,方便存储和计算大量地图数据。
3.3 地图更新流程
在基于车云协同的地图更新系统中,自动驾驶车辆通过以下的流程完成地图更新:(1)以矿用卡车为主的运载装备在作业过程中,通过导航卫星系统记录车辆的大地坐标;
(2)车辆结合底层状态信息,利用均值滤波得到平滑的车辆轨迹;
(3)车载端通过5G通信设备与云端通信,将车辆的轨迹和状态信息编码并上传至云端;
(4)云端接收到车辆信息后,网关模块开始解码车辆状态和轨迹信息,并将解码成功的数据输入到地图更新模块;
(5)地图更新模块将收到的地图信息与数据库中的地图数据进行比对,针对不同场景进行数据更新;
(6)云端网关编码更新数据,并分发至车载端;
(7)车辆收到云端消息后解码地图数据,并将地图数据保存至本地,供车辆其他功能模块使用。
基于车云协同的地图更新系统的车载端数据采集和预处理采用C++实现,云端地图更新由Java实现,数据库采用MySQL实现。该系统部署在一台配置为Intel Core i7-7500U CPU、16 GB内存、500 GB SSD、Windows 10 64位操作系统的笔记本电脑上。利用该系统进行实验来验证本文提出方法的可行性。计算时间取决于数据采集阶段的数据量大小和待更新地图的大小。为方便验证,本次实验选择在空旷场地进行。
4.1 地图表示
使用非结构道路地图表示方法[14]构建一个大小为200 m×300 m的地图,如图9所示。

图9 地图表示Fig.9 Map representation
地图上有3个作业区域和3条连接它们的双向道路。此外,如图10所示,获取传统路网地图和三维点云地图。
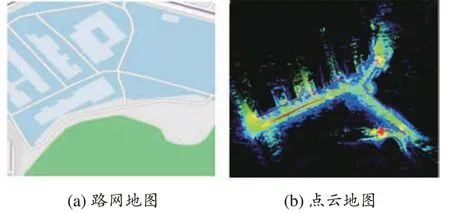
图10 路网地图和点云地图Fig.10 Road network map and point cloud map
对比了地图构建精度和数据量,如表4所示,本文所提出的地图方案精度高、数据量小。

表4 3种地图对比Tab.4 Comparison among three maps
4.2 地图更新
本节基于4.1节中构建的地图,对地图更新算法进行实验验证。
4.2.1 边界扩展
为了验证所提出的边界扩展算法,驾驶一辆装有定位系统的探测车辆沿作业区边界行驶多次,并记录了它的轨迹,轨迹由855个坐标点组成,如图11中的绿点所示。将上述轨迹数据发送至云端,通过边界扩展算法得到最终的新边界,区域扩展边界长度约为24 m,如图11中绿色实线所示。新边界用于替换旧边界(黑色曲线)。工作区域的边界扩展与地图的更新效果如图12所示,红圈所示为更新的区域。

图11 用原始数据进行边界扩展Fig.11 Boundary extension with original data

图12 边界扩展Fig.12 Boundary expansion
4.2.2 道路添加
为了验证所提出的道路添加算法,采用与4.2.1节相同的数据采集过程,收集了2 795个坐标点,如图13中蓝点所示。这些点的x坐标在区间[690 493.35,690 497.38]中,y坐标在区间[3 117 972.63,3 117 977.22]内。利用这些数据,由道路添加算法推断出点P1和P3坐标分别为(690 497.38,3 117 972.63)和(690 493.35,3 117 977.22)。因为新增的道路是一条笔直的道路,这条路的两端等宽。因此,在道路添加算法中,将所有坐标点放在一个矩形中,并推断出最远的点P2,其坐标为(690 440.13,3 117 937.05)。使用点P1、P2、P3和道路的宽度,推断了新路的两条道路边界,如图13中的蓝色虚线所示。之后,使用这两条边界来推断新路的中心线(红色虚线)。接下来,基于点P1、P3和原始道路的边界来推断点P4和P5,其坐标为(690 505.16,3 117 977.39)和(690 501.78,3 117 982.01),依此构建了路口的边界。同时,如2.2.2节所述,相应的信息在有向图中同步更新。至此,在静态地图和道路网络中都完成了道路添加,如图14所示。

图13 用原始数据进行道路添加Fig.13 Road addition with original data

图14 道路添加Fig.14 Road addition
4.2.3 道路删除
一般来说,道路删除的过程与道路添加的过程相反。为了验证所提出的道路删除算法,删除图14中新增的道路。在区域边界中删除新道路的两条边界、中心线和新路口的边界。将点P1和P3两个点连接起来。然后,添加相应的原始道路中心线。道路删除后的结果如图12所示。同时,通过移除顶点表和边表中的相应行,删除有向图中的相应节点和权值。至此,在边界层和有向图层都实现了道路删除。
4.2.4 基于车云协同的地图更新
本文测试了不同更新模式下地图更新时延与轨迹数据量的关系,结果如图15所示。单车模式指车辆仅依赖自身轨迹数据和计算能力完成地图更新。车云协同模式下,地图更新时延包括车辆上传数据时间、云端计算时间与地图回传时间。单车模式下,地图更新时延主要由本地数据处理产生。随着轨迹数据量增加,两种模式的更新时延都同步增加。但是,由于车辆的计算资源有限,导致其更新时延大于车云协同的更新时间。数据量越大,这种差异也越大,甚至由于延迟过大而导致任务失败。而在车云协同模式下,即使地图数据量达到300 KB,也可以在2 s内将更新结果返回车辆。相对于单车模式,车云协同模式的平均更新时延缩短了75%,满足了地图鲜度的要求。

图15 地图更新时延与轨迹数据量关系Fig.15 Map updating delay and track data response
本文对长度为50 m的更新边界做了更新精度测试,每条轨迹数据量大约为50 KB。两种模式下地图更新精度与轨迹数据量的关系如图16所示。在单车模式下,由于多车轨迹数据不互通,导致地图的更新精度维持在80%附近。在车云协同模式下,随着上传的轨迹数据量增长,精度也在不断提升,但是当上传轨迹数据量超过250 KB后,精度的提升效果不明显,稳定在95.4%。因此,采用5条轨迹更新地图即可保证较高精度。相对于单车模式,车云协同模式的更新精度提高了10%,满足了地图保真度的要求。

图16 地图更新时延、精度与数据量的关系Fig.16 Relationship among map updating delay,accuracy and data size
本文还测试了每次地图更新的上传轨迹数据量和下发地图数据量,如图17所示。利用3条轨迹推断每段更新边界,随着更新边界长度的增长,上传轨迹数据量和下发地图数据量也随之增加。下发地图数据量与上传轨迹数据量的比值称为转换比。该比值代表了上传轨迹数量的利用率,比值越高,说明数据挖掘越深。随着更新边界长度的增加,转换比增加,表明数据的利用率也越高。因此,在每次地图更新时,地图变化越明显,资源的利用率就越高。

图17 上传和下发数据量对比Fig.17 Comparison of data volume between upload and delivery
本文主要研究了露天矿山场景中的地图更新问题,构建了三层地图模型结构;
针对3个典型更新场景提出了基于轨迹的边界扩展算法、道路添加算法和道路删除算法;
同时,还构建了一种基于车云协同的地图更新系统;
最后,通过实验验证了所提方法和地图更新系统的可行性。实验结果表明,本文所提基于车云协同的露天矿山数字地图能较好地表征露天矿山的地图特征,能在较短时间内实现较高精度的地图更新,同时满足了地图的鲜度以及保真度的要求,解决了车辆计算资源有限,地图数据处理效率低的问题。
在未来工作中,露天矿山仍有很多地图更新问题需要解决,包括边界缩小、区域的增加和删除等。后续希望面向矿区设计一种从探测车辆的数据采集到地图更新都高度自动化的地图更新系统。
猜你喜欢数据量露天矿边界拓展阅读的边界儿童时代·幸福宝宝(2021年11期)2021-12-21备战铁矿露天矿与挂帮矿同时开采稳定性研究有色金属(矿山部分)(2021年4期)2021-08-30基于大数据量的初至层析成像算法优化北京大学学报(自然科学版)(2021年3期)2021-07-16露天矿山土石方量的测量及计算电子乐园·上旬刊(2021年8期)2021-05-16高刷新率不容易显示器需求与接口标准带宽电脑爱好者(2020年19期)2020-10-20意大利边界穿越之家现代装饰(2020年4期)2020-05-20宽带信号采集与大数据量传输系统设计与研究电子制作(2019年13期)2020-01-14论中立的帮助行为之可罚边界证券法律评论(2018年0期)2018-08-31基于Delphi-TOPSIS法的露天矿采区接续方案优选中国煤炭(2016年9期)2016-06-15河北将对1881个露天矿山开展环境治理河北地质(2016年1期)2016-03-20猜你喜欢
- 2024-01-20 有关于第五次全国经济普查统计重点业务综合培训大会上讲话(完整文档)
- 2024-01-20 “严纪律、转作风、保安全、树形象”专题学习教育活动通知(完整文档)
- 2024-01-20 2024XX区住房城乡建设工作情况汇报
- 2024-01-20 2024高校思政教育交流材料:善用反腐败斗争这堂“大思政课”(精选文档)
- 2024-01-20 2024年主题教育专题党课辅导报告,(4)
- 2024-01-20 关于赴某地学习考察地方立法工作情况报告(范文推荐)
- 2024-01-20 2024年度关于增强党建带团建工作实效对策与建议(精选文档)
- 2024-01-20 教师演讲稿:春风化雨育桃李,,潜心耕耘满芬芳(全文)
- 2024-01-20 主题教育第二阶段来了
- 2024-01-20 2024年度关于到信访局实践锻炼个人总结【完整版】
- 搜索
-
- 打赌输了任人处理作文1000字7篇 05-12
- 当代大学生在全面建设社会主义现代化强 05-12
- 全面建成社会主义现代化强国的战略安排 03-10
- 个人廉洁自律方面存在的问题及整改措施 05-12
- 谈谈青年大学生在中国式现代化征程上的 05-12
- 2022年党支部第一议题会议记录(全文完 11-02
- 作为青年大学生如何肩负时代责任6篇 05-12
- 村党组织建设现状及工作亮点存在问题与 05-12
- 全面从严治党,自我革命重要论述研讨会 05-12
- 产业工人队伍建设改革(全文完整) 10-31
- 11-25国庆70周年庆典晚会 庆典晚会串词
- 11-25办公室礼仪的十大原则 浅谈办公室的电话礼仪
- 01-17用心灵轻轻地歌唱_心灵的歌唱
- 01-17也许你不是我一生的唯一|也许不是我
- 01-17爱了,请珍惜;不爱,趁早放手|爱就珍惜不爱就放手
- 01-17岁月带走的是记忆,但回忆会越来越清晰|有趣又有深意的句子
- 01-17曾经的美好只是曾经,我只想珍惜身边的人|我只想珍惜你
- 01-18从容不惊 [学会笑眼去看世界,不惊不乍,淡定从容]
- 02-03当代大学生学习态度调查报告
- 02-03常用护患英语会话
- 标签列表
