首页 > 心得体会 > 学习材料 / 正文
脉冲星特征频率信号的到达时间处理方法
2023-05-05 15:05:05 ℃徐国栋,张丹蕾,徐振东
哈尔滨工业大学 航天学院,哈尔滨 150001
脉冲星的发现对天文物理具有里程碑意义,1967年Hewish等[1]发现了第一颗脉冲星,其后不久又有多颗脉冲星被天文学家发现,出现了一波脉冲星探测的高潮。由于观测到脉冲星信号具有稳定的周期及良好的长期稳定性,1974年Downs[2]提出了基于射电脉冲星的导航方法。经过30年的研究发展,2004年ESA报告分析了脉冲星导航基本原理及信号模型,并阐述了系统的工程可实现性[3]。2005年美国马里兰大学Sheikh[4]在其博士论文中提出了一套脉冲星信号到达时间(Time of Arrival, TOA)的精确转换模型,建立了适用于X射线脉冲星自主导航的数学模型,从而形成了基于X射线脉冲星自主导航的基础理论。
2017年美国国家航空航天局(National Aeronautics and Space Administration, NASA)将NICER探测器安装在国际空间站上,开展了在轨演示X射线毫秒脉冲星导航技术试验与验证工作,通过对多个毫秒脉冲星的观测,评估X射线脉冲星导航技术的实时轨道确定精度,在观测脉冲星8 h后,自主导航系统的精度达到5 km[5]。NASA空间发展规划同时制定了X射线导航技术发展的短期与长期目标,其长期目标为利用毫秒级脉冲星实现航天器星际导航,导航性能为在高动态环境下小于10 km的定位精度,在低动态环境中实现几百米的定位精度。
中国也于2004年展开了对脉冲星导航技术的全面研究,并在航天器自主导航领域快速推进,于2011年实施了脉冲星导航技术研发创新管理[6],重点对X射线脉冲星导航技术进行了系统的研究。中国空间技术研究院、中国科学院高能物理研究所、国防科技大学、西安电子科技大学以及哈尔滨工业大学等单位均开展了X射线脉冲星导航技术的研究,发展十分迅速。
在X射线脉冲星导航技术试验方面,2016年中国发射了专用试验卫星(X-ray Pulsar-based Navigation-1, XPNAV-1)[7],由中国空间技术研究院研制,主要任务是开展X射线脉冲星在轨观测,验证X射线脉冲星导航技术[8]。2017年中国第1颗硬X射线天文卫星“慧眼”(Hard X-ray Modulation Telescope, HXMT)成功发射,开展了X射线脉冲星导航的在轨试验,对著名的蟹状星云脉冲星进行了约5 d的观测,可实现10 km的位置定位精度[9-10],进一步验证了航天器利用脉冲星自主导航的可行性,为未来深空应用奠定了基础。
虽然验证了X射线脉冲星导航原理的技术可行性,但在实际应用中还存在着很多约束条件。对于导航应用,特别是空间应用,导航系统的定位精度、体积重量功耗是决定它是否适用的关键因素。脉冲星信号能流密度极低,收集脉冲星信号能量所需要的时空尺度很大,使得脉冲星导航接收机的体积在物理上难于小型化[11-13],其轻型化设计几乎成为脉冲星导航应用的唯一选择。在已有GPS接收机为参考的情况下,脉冲星导航应用的范围非常有限。
由于深空探测无法利用GPS进行导航定位,使得脉冲星导航定位的优势得以体现,而实现脉冲星导航定位的必要条件是实现脉冲星信号的TOA处理。主要包括基于最大似然的参数估计[14],基于频谱的脉冲星信号辨识[15-16],基于互相关和最大似然估计的弱信号检测[17],以及信号相关法[18]等。这些处理方法或是利用时域性质获取脉冲星信号的到达时间,或是利用频域参数获取时间参数信息,但信号处理的类型不多,基本是信号与信息处理的一些传统方法。由于信号在频域的相位信息反映了信号在时域的延时,而信号到达时间的特征是峰值或波谷相对时延,并且频域不用模板匹配处理,因此本文采用信号频域处理提取脉冲星信号的到达时间参数。
在合理的时空尺度约束条件下,脉冲星导航系统必然面临着极低信噪比、并且定位精度应满足使用要求的挑战[11-13,19-22],而迎接这种挑战,必须在脉冲星信号处理方面取得突破。
本文探讨分析了脉冲星信号的特点,基于傅里叶分析、信号与信息处理等理论,提出采用脉冲星特征频率信号处理获得TOA的方法,证明了特征频率信号处理为最佳匹配滤波,为任意脉冲星信号的最佳处理提供了理论依据。基于高精度雷达原理,提出了脉冲星信号的宽带处理技术,利用脉冲星信号的特点,提高了TOA的估计精度,探索了高精度脉冲星导航的技术途径。
1.1 脉冲星信号到达时间(TOA)估计
对TOA的估计,可分为时域及频域处理。从信号形式上看,有脉冲星信号观测轮廓积累和光子到达时间TOA估计2种。由于脉冲星信号能流密度极低,以最强的Crab脉冲星信号作为参考,在X射线频段其能流密度也不过约1 ph/(s·cm2)(ph为光子photons缩写)[4],1 m2面积的探测器在1 s时间内所接收的光子数约1×104个,每个脉冲星信号周期获得的平均光子数约为300个,因此几乎不可能观测到连续的脉冲星信号波形,无法直接测量脉冲星信号的TOA,其脉冲星信号波形主要是利用信号的周期性通过多周期统计积累获得。
基于脉冲星观测轮廓的TOA估计方法以恢复脉冲星轮廓为基础,通过将积累得到的观测轮廓与标准模板轮廓进行对比,从而实现对TOA的估计。目前,基于轮廓的TOA估计主要在时域进行,采用优化理论进行求解,其脉冲星信号轮廓一般采用历元折叠统计获得。历元折叠的基本思想是:将观测时间段内所有的光子时间标签按脉冲星信号周期取模,并将周期量化为多个时间片段,统计每个时间片段内的光子数目,利用统计直方图近似获得脉冲星信号的轮廓。
通过多周期的信号积累对信号进行估计,基本条件是信号已按周期对准,或相位对准。图 1给出了n个周期脉冲星信号,每个周期再量化为m个间隔进行折叠统计的示意图。

图1 脉冲星信号的周期折叠统计Fig. 1 Pulsar signal statistics in epoch folding
观测到的脉冲星信号x(t)可以表示为x(t)=s(t)+n(t),其中s(t)为理想信号,或用模板信号近似,n(t)为噪声。其离散形式表示为
在最大似然准则下,对参数的最佳估计为
式中:μm与σm分别是信号的均值与方差。显然多周期信号相同相位采样值的均值与脉冲星信号的真值最接近,而方差则反映了噪声的大小。观察均值信号可以发现,脉冲星信号波形特征随着n的增加逐渐清晰,当n≥Ns时(其中Ns为模板统计所用的周期数),其均值信号波形即为脉冲星信号波形,并可作为所谓的脉冲星信号模板使用。一种合理的假设是,因为从时间分布看,噪声出现的机会是均等的。
对于脉冲星模板信号,s(t)=μm,则对信号实现最佳检测的是匹配滤波器:
其匹配滤波器输出为
式中:R(t)为自相关函数;
N(t)为输出噪声;
τ为时移量。匹配滤波器的输出具有最大的信噪比,可实现最佳的信号检测。同时匹配滤波器也是相关器,即最佳检测是理想的脉冲星信号模板与采样信号之间进行的相关处理。当t=0时自相关函数即为信号功率:
匹配滤波器输出的信噪比为
式中:N0为接收机噪声因素;
Bn=为噪声带宽,f为频率,f0为最大响应幅值处的频率;
Ts为环境温度;
k为波兹曼常数。
经过多周期平均,获得了脉冲星信号的最大似然估计,其波形特征渐进逼近模板波形;
经过匹配滤波器处理,获得最大信噪比输出时刻,即可获得TOA观测值。直接从多周期平均信号中获取TOA参数(例如峰值测量),其信噪比要低于匹配滤波器输出的信噪比,因此采用匹配滤波处理也是一种最优参数估计方法。
由于多普勒效应、脉冲星信号周期变化、引力延时等因素影响,多周期积累信号中的每个周期信号相位也有一定变化,因此需要对每个周期信号的相位进行修正补偿,才能获得质量良好的信号积累波形,以便在其后的处理中获得最大的匹配输出信噪比。显然,要实现对上述因素的补偿修正,需要知道准确的时间、空间及速度信息,但在没有匹配输出TOA时刻之前,要获得这些信息也是不现实的。
另一方面,先进行匹配处理再进行相位修正补偿,则由于输入信号的信噪比太差,信号完全没有波形特征,造成匹配滤波器处理处于严重的失配状态,其输出信噪比也非常低,也无法进行准确的TOA观测,再进行信号积累仍然存在较大的相位偏差。
根据Sheikh[4]的分析,脉冲星信号到达时间TOA的精度为
式中:W为脉冲星信号的等效脉冲分量时宽;
SNR为信噪比。信噪比用信号脉冲分量计数与噪声方差计数表示为
式中:NSpulsed为脉冲部分光子计数;
σnoise为噪声计数方差;
NB为背景噪声计数;
NSnon-pulsed为非脉冲部分光子计数;
下标duty-cycle表示工作周期。因此有
对于Crab脉冲星信号,采用1 m2探测器,信号脉冲分量的光子计数每秒不超过NSpulsed=1.54×104×10%,则σTOA≥0.012W。Crab脉冲星信号的W=1.67 ms,因此σTOA≥21 μs,等效定位误差>6 km,这也是在没有背景噪声下利用Crab脉冲星能够实现的最好定位精度。考虑到噪声光子计数大约是有效信号光子计数的10倍左右,则定位误差在20 km以上。
根据观测数据,通常选择可用于导航应用的脉冲星,例如毫秒级脉冲星,其信号能流密度一般<10−4ph/(s·cm2)量级,比Crab脉冲星低了4个量级,更难获得高信噪比信号,因此仅靠传统的信号处理方法实现脉冲星导航应用是非常困难的。
1.2 脉冲星信号特征频率
周期的脉冲星信号可以用傅里叶级数分解成一系列的谐波分量,包括直流分量,基频分量及高次谐波分量。其中直流分量不包括脉冲星信号的任何信息,而基频分量的周期与脉冲星信号周期相同,定义为脉冲星信号的特征频率信号。特征频率信号的幅度与脉冲星信号存在固定的比例关系,通常超过10%;
特征频率信号的相位与脉冲星信号的峰值、TOA或其他信号特征也具有特定的时序关系。因此,获得了特征频率信号的相位,也就获得了TOA的信息,进而可以用于导航定位。
背景噪声具有与脉冲星信号相同或相近的X射线光子谱段,其噪声幅度分布与脉冲星信号幅度也具有特定的比例。在探测器中,超过检测门限的X射线光子信号被记录,被量化为1 bit的数字信号,其量化输出为
式中:Q[·]表示量化运算;
n(t)为噪声;
ε(t)包含量化噪声及背景噪声,也包括了除特征频率信号s(t)之外的其他谐波分量。
脉冲星特征频率信号可以表示为离散复余弦形式:
式中:A为特征频率信号的复振幅;
n为采样序号;
N为离散傅里叶变换(Discrete Fourier Transform, DFT)采样数;
k为离散傅里叶变换后频域信号分量序号;
kf表示特征频率信号在N采样点中变化的次数。
将1 bit量化的信号x(t)进行DFT处理,则有
式中:X(k)为特征频率信号的频域表达形式,其均值与方差分别为
特征频率信号功率为
其信噪比为
通过X(k)获得特征频率信号的相位信息,其相位误差为
式中:|·|表示取模;
ΔX为相位误差引入的频谱幅值误差,因此有
相位观测误差σφ与时间观测误差σt具有如下关系:
式中:fs为特征频率信号频率,因此有
其中:Ts为特征频率信号周期;
Tp为脉冲星信号周期;
且有Ts=Tp。可见时间观测误差与采样点数N的平方根成反比,与信噪比SNR的平方根成反比。
由于X射线光子信号的特点,信号光子与噪声光子在能量幅值上没有量级上的差别(或信号功率与噪声功率没有量级的差别),都可以被探测器以单光子能量进行检测,无论是信号还是噪声,只要超过检测门限即可输出。在1 bit量化条件下,信号与噪声同时出现时被量化为信号,而无信号时出现的噪声被量化为噪声,因此信噪比的差别主要反映在光子计数方面的差别。在一定背景下,信噪比及信号周期均为定值,能够改善测量精度的参数是采样点数。
时间观测精度与采样点数的平方根成反比是特征频率信号处理的重要特点,增加处理时间可以增加采样点数,从而提高测量精度,但在不增加测量时间的条件下通过提高采样率增加采样点数,提供了一种更加吸引人的改善测量精度的技术途径,这就是脉冲星信号的过采样处理。
脉冲星特征频率信号处理不能提高信号增益,但它改善了噪声特性,减小了噪声方差,因此提高了信噪比,其综合处理增益提高10lgNdB,时间观测精度提高N倍。
利用脉冲星特征频率信号估计TOA,其精度依赖于相位估计误差σφ。特征频率信号即为正弦信号,而对正弦信号相位估计的克拉美-罗界(Cramer-Rao Bound,CRB)为当N≫1时,克拉美-罗界可表示为。对于实余弦信号,其信号幅值是式(11)复余弦形式的一半,则式(17)给出的相位估计误差可表示为
因此,采用特征频率信号相位对TOA进行估计时,与理想的克拉美-罗界相差3 dB。当采样数N≥100时,用特征频率信号对克拉美-罗界的估计偏差<1.5%。图 2给出了特征频率TOA估计方差与克拉美-罗界与采样数N的关系。

图2 特征频率TOA估计方差与克拉美-罗界对比Fig. 2 TOA estimation deviation for characteristic fre⁃quency vs CRB
提高采样序列长度N有2种方法:一方面是提高采样率;
另一方面是增加采样时间。RXTE卫星获得的Crab脉冲星数据,其时间粒度是100 μs,对应10 kHz的采样率,1 s时间内有104次采样,将采样率提高到100 MHz,则序列长度为108量级。如果增加采样时间使序列长度增加到108量级,则需104s的时间采样,接近2.8 h。从应用角度看,提高采样率是一种可行的方法,在100 MHz采样率内是可以实现的。如果将X射线探测器输出的脉冲信号以1 bit量化为光子计数方式采样,则可用FPGA器件直接对脉冲信号进行检测,而高速FPGA处理1 GHz的脉冲信号已是成熟技术,实现100 MHz的采样处理具有较大的设计余量。
脉冲星特征频率信号处理是一种与脉冲星信号波形特征无关的最佳匹配滤波方法,最佳匹配滤波保证了信号处理可以获得最大信噪比,对提高信号到达时间TOA的观测精度具有最优的性能,而与脉冲星信号波形特征无关的特点,极大扩展了脉冲星信号选择的范围,也简化了信号处理系统,为快好省发展方向提出了一种可行的技术途径。
从频域上看,信号功率谱密度主要为低频分量,噪声功率谱密度为常值,如图 3所示。

图3 脉冲星信号与噪声功率谱Fig. 3 Pulsar signal with noise power spectrum
因此有
式中:N0为白噪声功率谱密度;
B为噪声带宽;
Pm为信号功率谱峰值。
在白噪声情况下,信噪比小于信号功率谱密度最大值邻域内的信号功率谱密度与噪声功率谱密度之比。由此可见,如果将信号功率谱最大值对应的频段内信号滤波处理出来,则可以获得最大的信噪比输出。
对于周期的脉冲星信号,l次谐波分量的信噪比可表示为
式中:Al为l次谐波分量幅值;
ΔBl为频域单位带宽。滤除直流分量及高次谐波分量,则前L次谐波分量信号的总信噪比为
在特征频率处,信号具有最大的幅值,其功率密度也为最大值,通过傅里叶分析可以获得特征频率信号分量,因此采用特征频率信号将给出最大的信噪比。根据式(23)可有
式中:下标lf表示特征频率。信噪比最大,意味着对相位精度的估计精度高,其定位精度也会提高。由于采用特征频率信号可以获得最大的信噪比,因此特征频率信号的TOA估计也是最佳估计。
2.1 脉冲星特征频率信号的TOA处理
脉冲星特征频率信号具有与原脉冲星信号相同的周期,脉冲星信号的峰值特征点对应的时刻与脉冲星特征频率信号的过零点时刻具有确定的时间延时,检测到特征频率信号的过零点时刻,也即确定了脉冲星信号的到达时间TOA。将脉冲星信号经过离散傅里叶变换(Discrete Fourier Transform, DFT)处理后,提取特征频率信号,对特征频率信号进行逆离散傅里叶变换(Inverse Discrete Fourier Transform, IDFT),再检测特征频率信号的过零点。由于过零点时刻与TOA具有确定的关系,因此也可以认为过零点时刻即为TOA。
特征频率信号过零点时刻,与特征频率信号相位是等价的。在频域的相位信息对应时域的信号延时。如果X射线探测器相对脉冲星运动速度为0,则每次收到的特征频率信号过零点时刻相同;
如果存在相对运动速度,则接收的信号延时发生变化,导致过零点时刻也发生相应的变化;
在频域看,特征频率信号的相位也按比例变化。相对时间的相位变化即为多普勒频率,特征频率信号处理正是利用多普勒频率导致的信号相位变化来检测过零点时刻的,无需再对多普勒频率进行其他处理。
利用脉冲星信号特征频率的TOA测量方法,直接对Crab脉冲星信号进行DFT处理,通过检测特征频率信号相位的过零点,获得了TOA参数,如图 4所示。

图4 特征频率信号获得TOA参数Fig. 4 TOA parameters extracted from characteristic frequency signal
通过对RXTE卫星的Crab脉冲星数据进行DFT处理,验证了特征频率信号处理的优越性。RXTE卫星获取的Crab脉冲星数据总计2700 s,每30个Crab脉冲星信号周期处理1次,时间为1.0051 s。每进行1次DFT处理的序列长度为10051,变换处理完成确定1次TOA。
根据分析,Crab脉冲星原始信号的信噪比大约为−10 dB,RXTE卫星所记录的X射线光子计数中每10次计数大约有一次为Crab脉冲星发射的X射线光子信号,信号完全淹没在噪声里。经过1.0051 s时间序列的DFT处理,其特征频率信号的信噪比平均为5 dB,处理增益为20 dB。图 4为一次更新处理过程的脉冲星信号及特征频率信号,也给出了连续3次更新的特征频率信号相位及相对关系,数据分析表明特征频率处理具有良好的相位估计精度。
利用DFT处理获得的脉冲星信号TOA反映了RXTE卫星的运行轨道。根据RXTE卫星提供的轨道参数,计算了该轨道在Crab脉冲星方向上的投影。再利用DFT方法获得的TOA参数转换为RXTE卫星在Crab脉冲星方向上的轨迹,其真实轨道投影轨迹与利用特征频率信号观测TOA获得的轨迹一致,其方差σr≤9 km,在进行滤波处理后,其方差σr可减少到3 km量级,是仅利用脉冲星信号观测数据实现定位方法中精度最高的,见图 5与图 6,其中rn为轨道半径。

图5 特征频率信号相位获得的RXTE卫星轨道投影(σr=9 km)Fig. 5 Orbit projection of RXTE satellite estimated by phase of characteristic frequency (σr=9 km)

图6 特征频率信号相位获得的RXTE卫星轨道投影(σr=3 km)Fig. 6 Orbit projection of RXTE satellite estimated by phase of characteristic frequency (σr=3 km)
根据RXTE卫星的数据处理过程,可以给出一种脉冲星导航系统方案,如图7所示。在图7中,信号处理与特征识别模块主要是利用脉冲星特征频率信号获取TOA参数,并按上述方法获得某颗已知脉冲星方向矢量的轨道投影,测量3颗独立的X射线脉冲星信号,则可解算飞行器空间相对位置增量。关于相对定位原理可参见文献[23]。

图7 脉冲星导航系统方案Fig. 7 Schematic diagram of pulsar navigation
2.2 脉冲星特征频率信号TOA仿真结果分析
脉冲星特征频率信号是与脉冲星信号周期相同的正余弦信号,当采样时间为1个脉冲星信号周期时,其特征频率信号为1个周期的信号,频点为1,表示在该时间内信号变化1次。当采样时间为M个周期时,其特征频率信号变化M次,因此频点为M。在频域,采样时间为1个周期T时,其频域1个频点对应的带宽为1/T,当采样时间为M个周期T时,其频域1个频点对应的带宽为1/(MT)。
由于噪声功率谱为N0,因此每个频点对应的噪声功率为Np=N0ΔB,其中ΔB为频点对应的带宽。由于多周期时长的增加,在频域其对应频点带宽减少,因此当采样时长为MT时,噪声功率也相应下降为
与1个周期时长相比,M个周期时长的信号处理其噪声功率降低M倍。用分贝表示为
根据量化信噪比与量化位数及采样率的关系:
式中:nq为量化位数;
fm为最高信号频率;
fs为采样频率;
mo为过采样倍数。
可见增加采样率可以提高信噪比,采样率提高1倍,其信噪比也将提高3 dB,在信号功率相同条件下也等效降低噪声3 dB。特征频率信号处理以增加信号分析时长方法减小了单位频域采样点的噪声功率,以高采样率将噪声分布在宽带频域内,使特征频率信号处理具有很高的增益,可实现极低信噪比脉冲星信号的高精度时延估计,为高精度脉冲星导航奠定了理论基础。
无论是多周期处理还是高采样率处理,其本质是一致的,可以统一处理。在特征频率信号处理中,信号采样时间也是数据更新周期,该参数与飞行器速度、系统数据处理、数据更新率有关。例如飞行器速度为30 km/s,其多普勒频移为0.003 Hz,因此数据处理时间不能超过300 s(主要受固定频点检测约束)。为了获得更高的处理增益,期望较高的采样率,但该参数受实际系统性能的限制,以目前的技术条件,实现100 MHz采样率是可行的,其处理增益可达100 dB,时延测量精度为0.35 μs,定位精度约为10 m(参考Crab数据),数据更新时间100 s。
2.3 脉冲星信号量化影响分析
X射线脉冲星信号主要是以光子计数形式出现的。一般认为:X射线脉冲星光子信号到达时间的量化粒度对脉冲星信号波形的TOA观测精度影响不大,在RXTE卫星中观测的Crab脉冲星光子信号记录的时间粒度为100 μs,在此时间间隔内,统计观测到出现的光子计数为0~7,其出现比例如表 1所示。
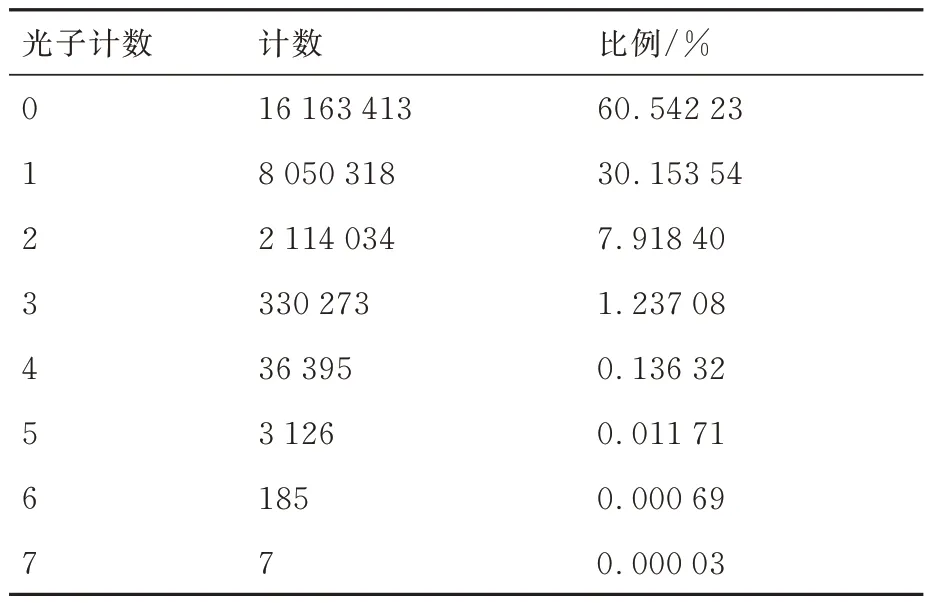
表1 Crab脉冲星信号光子计数统计分布Table 1 Statistical counts of photon for Crab
由表 1可见,在100 μs的量化时间间隔内,光子计数出现0或1的比例占90%以上。可以推断:当量化时间间隔减小后,其0/1出现的比例将变大,甚至仅出现0/1的计数统计情形。因此对X射线脉冲星信号采用1 bit量化与实际的信号形式相匹配,甚至没有量化误差。RXTE卫星的定时精度为1 μs,如果以此周期量化时间进行光子计数统计,基本可保证仅存在0/1的光子计数。在不考虑单光子能量分布的情况下,X射线脉冲星信号光子检测与1 bit量化信号具有等效的形式,因此式(10)的量化输出也是准确的X射线脉冲星信号表达方式。
对于1 bit的量化信号,FFT可以表达成最简单的形式,仅用加减运算即可获得特征频率信号,对过采样应用非常有利。X射线脉冲星信号类似于条形码结构,条纹的疏密反映了光子能流密度在时间上的分布。每个光子在时间上的变化对脉冲星信号TOA产生一定的影响,其特征频率的相位是光子时间分布的统计效应,因此通过特征频率信号相位信号的处理可以确定脉冲星信号的TOA。
通过特征频率信号的相位确定TOA,消除了在时域对光子计数统计的复杂过程,也消除了复杂的时间变换过程,无需重建脉冲星信号的波形,对不同的脉冲星信号具有相同的处理方法,并且是一种最佳的TOA估计方法。在脉冲星导航应用中,只需脉冲星的方向矢量及信号周期参数即可实现导航处理。
对于Crab脉冲星输出量化噪声,采用1 bit量化与原始数据相比性能恶化约0.6 dB。考虑到运算量带来的收益,这种权衡还是值得的。而对于实际过采样处理,量化噪声损失可以避免。采用仿真数据进行了验证,结果还是令人满意的。
根据雷达原理,周期脉冲信号的时间测量精度主要取决于信号带宽,脉冲信号越窄,带宽就越宽,时间测量精度也就越高。在信号形式上,X射线脉冲星信号为δ(t)函数,以光子脉冲出现,其脉冲宽度由接收系统响应决定。因此假设脉冲周期为T,脉冲时宽为τ,且远小于周期,脉冲幅度为1,以此模拟1 bit量化的脉冲星信号。
发射的周期脉冲信号被接收机接收,在信号周期已知时,接收机可以按周期对信号进行处理。将相邻周期的信号进行“与”运算,显然不改变信号的形式,如图 8所示。

图8 周期信号“与”运算(无噪声)Fig. 8 Periodical signal and its “AND” operation (noise free)
当存在噪声脉冲时,噪声与信号同时出现表现为信号脉冲,没有信号时为噪声脉冲,经过相邻周期的“与”运算,可恢复信号脉冲,如图9所示。由于信号是按周期出现的,而噪声是随机出现的,因此相邻周期的信号经过“与”预算后可以保留,而噪声脉冲经过“与”预算后被消除。信号的脉冲越窄,受噪声的影响越小,噪声被“与”消除得越多。并且信号脉冲越窄,其时间测量的不确定性越小,即测量精度越高。
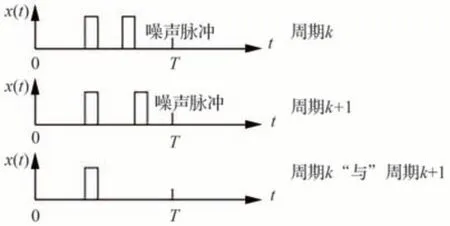
图9 周期信号“与”运算(有噪声)Fig. 9 Periodical signal and its “AND” operation (noise introduced)
将该方法扩展到多周期,可以将噪声脉冲降低到需要的指标。根据对脉冲星信号及背景噪声的分析,探测器单位面积接收的光子脉冲数为104ph/(s·cm2)量级,对于1000 cm2量级的探测器,每秒接收的光子数为107量级。
设探测器采样频率为100 MHz,则每秒产生108个采样,每个采样时间10 ns。假设一个周期采样数为NT,噪声脉冲在时间上为均匀分布,则对应每个采样出现噪声脉冲的概率为p=107/108=0.1。对于脉冲星信号,假设每个周期出现信号脉冲的概率为q。则连续Np个周期“与”运算至少出现1次噪声脉冲的概率为
连续Np个周期“与”运算检测出信号脉冲并且不出现噪声脉冲的概率为
因此平均时间测量值为
时间测量方差为
对于RXTE卫星探测的Crab脉冲星信号,其 时 间 分 辨 率 为τr=1 μs,采 样 率 为1 MHz。Crab脉冲星周期约为34 ms,则NT=34000。根据统计,Crab脉冲星信号平均100 μs出现1次光子计数,噪声脉冲出现概率约为p=0.01,每个周期内信号脉冲平均出现34个,信号出现概率约为q=0.5。用Np=5个周期进行“与”操作,则有P=3×10−6,Q=0.03,mt=0.1 μs,σt=59 μs,对应测 距 精度17 km,平 均5 s输出1次结果。
如果将“与”运算的周期增加到10个,则有P=3×10−16,Q=0.0009,mt=1 ns,σt=0.03 μs,对应测距精度10 m。由于信号检测概率太低,需要较长时间才能给出测试结果,平均需要341 s输出1次测试结果。
一般情况下,单位时间内信号脉冲与噪声脉冲的总数是一定的,只要采样率足够高,总可以使得噪声脉冲在单位时间内出现的概率小于一定值,即
式中:Nnoise为单位时间内的噪声脉冲数;
Nt为单位时间采样数。在信号周期Tp时间内,采样数为
当采用多周期“与”检测逻辑时,采用的周期数越多,则噪声消除的越好,但同时对信号也抑制的很严重,需要权衡考虑。假设采用的周期数为Nu,则噪声误检概率为
通常pNu≪1,因此式(34)近似为
当采样数超过噪声脉冲数10倍以上时,则p≤0.1,P以指数关系随Nu下降。如果将采样率提高r倍,则Nsample提高r倍,而p减小r倍,则有
一般Np>10,r>10,可见提高采样率可以更容易获得低的噪声误检概率。
脉冲星信号在时域表现为周期脉冲,在频域表现为特征频率信号及其他谐波与噪声干扰之和。经过DFT分析重建特征频率信号,该信号为相位加扰的正余弦信号。将正余弦信号量化为方波信号,则可以按“与”操作实现多周期的信号检测,其提高时间测量精度的原理如图 10所示。
由图10可见,每增加1个信号周期,其输出检测信号的脉宽就降低一点,信号的不确定性程度也相应降低,即提高了时间测量精度。以Crab脉冲星为例,设1 s时间内噪声脉冲数Nnoise=106,采样数Nt=108,则p=10−2,信号周期Tp=34 ms,Nsample=NtTp=3.4×106,采用10个周期进行“与”处理,即Np=10,则有P=3.4×10−14,Q=0.12,mt≈0.12τr,。

图10 正余弦信号的高精度测量原理Fig. 10 Principle of improving accuracy for detecting cosine signal
由于信号检测概率Q=0.12,因此约Q−1=9次可以获得1次信号检测数据输出,即0.3 s更新1次数据,其误差σt=0.3×10 ns=3 ns。因此理论上,如果对Crab脉冲星信号用100 MHz频率采样,则预期可以获得约1 m的定位精度。
根据式(19),脉冲星信号TOA参数估计的不确定度与脉冲星信号的周期成正比,因此期望采用周期短的脉冲星信号作为导航应用,例如选择所谓的毫秒级脉冲星。目前观测到的毫秒级脉冲星一般信号的能流密度非常低,信噪比也不高,这对导航应用是不利的。虽然可以选择能流密度较大的脉冲星作为导航星,尽可能采用信噪比大的信号源,其不利因素是可用的脉冲星数量将减少。由于导航定位同时观测到3颗脉冲星信号即可,因此只要选择的脉冲星数量合适,则脉冲星在天球中即可形成一个有效的构形,满足导航定位的要求。根据文献[4],表 2选择了能流密度>1 ph/(cm2·s)的脉冲星作为导航星,总计23颗,X射线范围为2~10 keV。
在表 2选择的脉冲星中,主要是毫秒级脉冲星,但有些脉冲星的信号周期还是较长的,信噪比较低,根据式(19)给出的TOA参数不确定度也较差。利用脉冲星信号谐波分量并非独立的特性,可以改善脉冲星信号TOA参数的估计精度[24-26],但当谐波分量增加时,其运算量成倍增加,并且参数估计精度无法进一步改善。
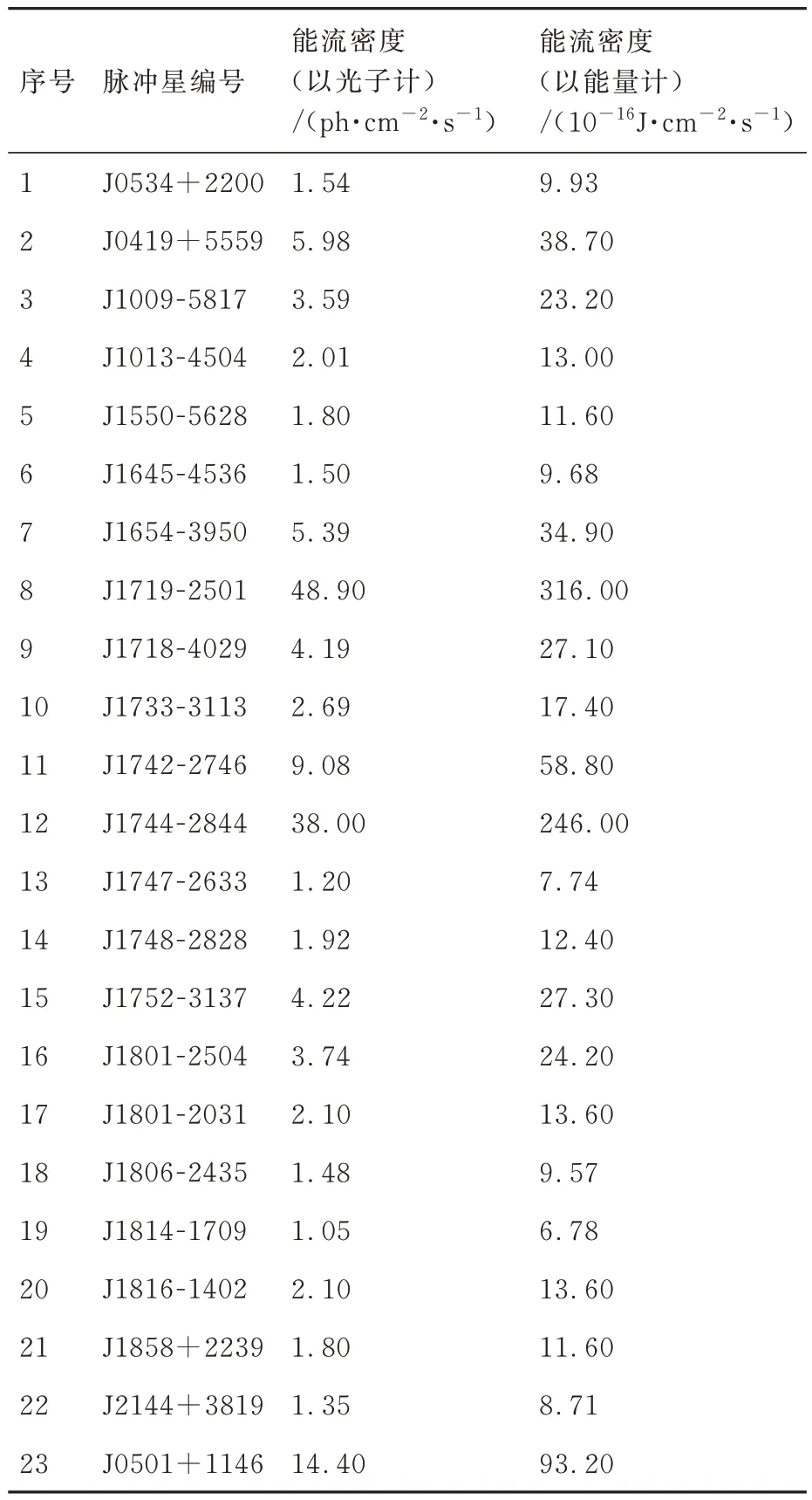
表2 选择的脉冲星Table 2 Pulsar sources selected
虽然多谐波分量处理对TOA估计性能改善不明显,但对利用脉冲星信号高次谐波的信息具有积极意义。在脉冲星特征频率信号处理的基础上,提出了脉冲星信号TOA高次谐波TOA估计方法。
脉冲星信号的M次谐波频率与脉冲星特征频率具有整数倍的关系,其谐波信号周期TM=Tp/M。因此根据式(19),其TOA测量的不确定度可以减小1/M。另一方面,信号脉冲的谐波频率分量也按1/M减小,其M次谐波信号幅值减小1/M,信噪比部分根据式(22)减小1/M2,因此总的TOA测量的不确定度并不会因此而改善。
虽然利用M次谐波频率信号并没有改善TOA测量的不确定度,但也没有恶化,这多少有一些意外,因为从谐波幅值的角度看,毕竟M次谐波的幅值一般情况下仅为特征频率信号的1/M,在信号功率存在差距的情况下,还能保持同样的性能,这是值的研究的。
可以预期,如果谐波次数足够高,以至于谐波信号的周期达到微秒,则信号周期对TOA测量不确定度的影响将成为次要因素,或TOA测量的不确定度将主要由信噪比决定。
显然,所谓谐波次数足够高,意味着信号本身具有非常宽的带宽,而对于X射线脉冲星信号,在时域就是一个个光子形成的δ(t)函数,它的频谱是无限宽的。然而由于所看到的频谱是经过了探测器系统形成的,而探测器系统是有限带宽的,它限制了所观测的脉冲星信号带宽;
并且通常在其后的处理中采用积累方法获得信号的波形,而积累过程等效于低通滤波,在此过程中,脉冲星光子信号携带的TOA信息损失严重。
极限情况是:X射线脉冲星光子到达时刻是X射线信号的相位调制信号。相位调制信号的带宽1/τ远大于通过积累形成的周期信号带宽fr,因此携带时间信息的相位调制信号在m次谐波频率mfr处其幅值基本不变,如图 11所示。图中fs为采样频率,τ为采样脉冲时宽。
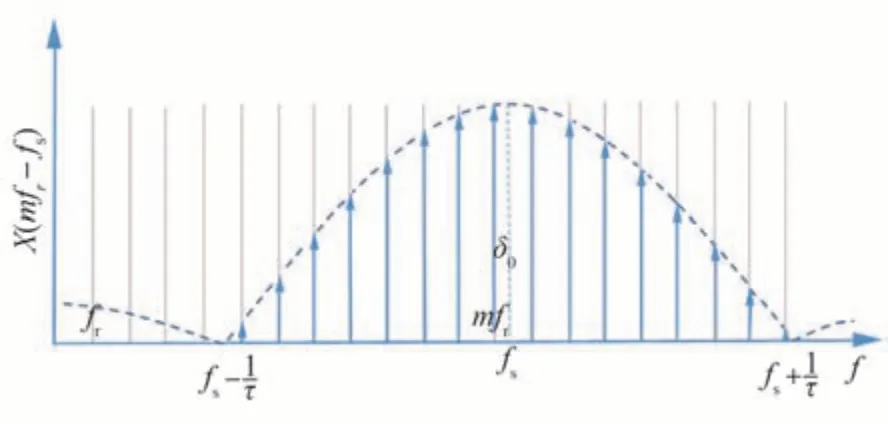
图11 相位调制与谐波频率的关系Fig. 11 Phase modulation vs harmonic frequency
根据信号的这种特性,在脉冲星信号采样频率远大于积累周期信号带宽的情况下,其高次谐波信号的幅值随频率增加下降的比较慢,甚至δ(t)函数的频谱特性呈现均匀分布的形式。图4所示的时域信号本身更类似于随机信号,因此在频域表现为白噪声的频谱特性,具有类似于扩频通信的作用机理,对于RXTE观测的Crab信号频域分析则验证了该结论。采用特征频率信号、二次谐波频率信号、三次及五次谐波频率信号进行轨道定位结果如图 12所示。

图12 利用特征频率及高次谐波频率信号定位Fig. 12 Feature and harmonic frequency signals used for positioning
采用远高于脉冲星特征频率的采样率,即过采样应用,则由于高次谐波分量在幅值方面下降得较慢,其信噪比下降也相对缓慢,因此可以获得高次谐波周期短带来的增益,等效于采用毫秒级脉冲星获得了微秒级脉冲星信号进行导航定位的效果,由此可降低对脉冲星导航星的要求,为脉冲星选择提供了一种新的方法。
事实上,X射线脉冲星的特征频率信号,将TOA信息调制到光子脉冲的时间位移参数中,相当于雷达发射的伪随机码脉冲序列,而该脉冲序列的匹配滤波器就是自身的编码序列,因此在进行匹配滤波处理后,其脉冲匹配输出具有脉冲压缩增益,这与雷达信号处理具有类似的机理。而在雷达信号处理技术中,雷达信号的带宽是决定雷达距离分辨率的关键因素,信号带宽越宽,则距离分辨率越高。至于编码形式,则是由脉冲星信号产生过程中自然形成的,它就是构成脉冲星信号的基向量,由正交的正弦函数基对信号波形进行编码,并具有统计意义。
从信息处理的角度看,TOA获取的本质是时间信息的获取。在扩频通信中,获取的信息量,可以通过提高信噪比实现,也可以通过提高信道的带宽实现。根据信息论有
式中:R为TOA携带的时间信息量。可见,TOA信息的获取,提高信道带宽B比提高信噪比更有效。对于脉冲星导航应用,在信噪比受限的情况下,提高信道带宽(系统带宽)是提高TOA测量精度的最优选择。而脉冲星特征频率信号以及高次谐波处理方法是实现宽带处理的技术途径,属于扩频处理的一种应用。
高次谐波频率信号定位偏差与信噪比并不存在比例关系,表 3给出了不同谐波频率信号的定位偏差统计值。
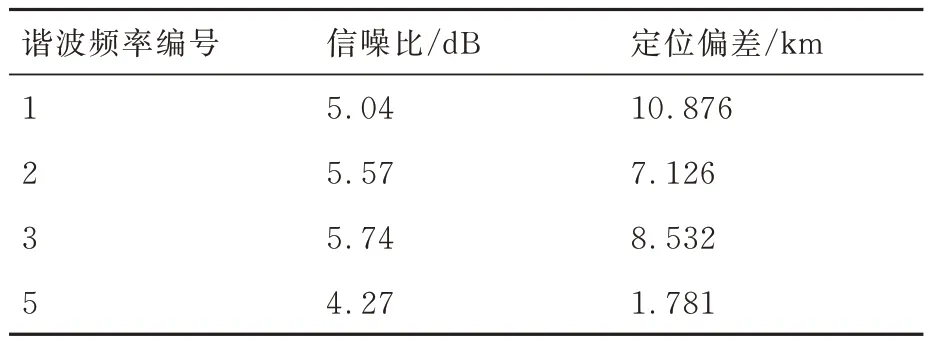
表3 高次谐波频率信号信噪比与定位偏差Table 3 Harmonic frequency signal to noise ratio and its deviation of positioning
由于信号统计具有一定的离散性,因此信噪比高不一定具有较小的定位偏差,但信噪比过低是无法定位的。对于Crab脉冲星信号,偶数次谐波除二次谐波外,均无法用于定位;
而奇数次谐波超过五次谐波后也无法用于定位,由图12定位曲线可见变化趋势。
在一定的信噪比保证下,高次谐波定位偏差略有改善,符合式(19)的预期。实际改善程度与脉冲星的信号特点有关,Crab脉冲星信号的二次谐波分量较大,其波形模板信号具有明显的2个峰值,二次谐波信噪比甚至比特征频率信号高,因此用其定位的偏差也略有改善。
对于其他脉冲星信号,其特征频率分量占主要部分,利用特征频率信号进行导航定位同样有效,仅利用脉冲星信号的周期参数即可。对于高次谐波分量的使用,取决于信号的频率分布特征。一般情况下,脉冲星信号的三次、五次、七次等奇次谐波按比例携带脉冲星信号的TOA信息,因此可通过这些谐波信号获取TOA参数,但谐波的选择最终取决于信噪比的限制。
1)提高X射线光子脉冲信号的采样率,可以提高TOA的时间分辨能力,并且光子脉冲信号将更多的以单光子脉冲信号的形式出现。对于单光子脉冲信号,等效为1 bit量化的数字信号,有利于采用FPGA进行高速信号处理。
2)基于特征频率的脉冲星信号处理,具有最佳的匹配滤波检测性能,并且基本与脉冲星信号波形无关,为脉冲星信号TOA测量提供了1种新的处理方法。
3)将脉冲星特征频率信号处理与过采样技术相结合,具有明显的信号处理增益,改进系统性能,有助于提高脉冲星导航定位精度,仿真分析验证了特征频率信号处理方法的有效性。
猜你喜欢脉冲星特征频率光子《光子学报》征稿简则光子学报(2022年11期)2022-11-26发现脉冲星的女天文学家——贝尔科学(2022年4期)2022-10-25瓷砖检测机器人的声音信号处理科技创新与应用(2020年4期)2020-02-25光学波前参数的分析评价方法研究光学仪器(2019年3期)2019-02-21基于振动信号特征频率的数控车床故障辨识方法制造技术与机床(2018年12期)2018-12-23基于小波去噪和EMD算法在齿轮故障检测中的应用湖北农业科学(2017年12期)2017-07-15基于虚拟观测值的X射线单脉冲星星光组合导航北京航空航天大学学报(2016年6期)2016-11-16长征十一号成功发射脉冲星试验卫星太空探索(2016年12期)2016-07-18光子嫩肤在黄褐斑中的应用中国医疗美容(2015年2期)2015-07-19在光子带隙中原子的自发衰减湖南师范大学自然科学学报(2015年1期)2015-02-27- 上一篇:多尺度特征和注意力融合的生成对抗壁画修复
- 下一篇:“地表水和海洋地形”卫星进展
猜你喜欢
- 2024-01-20 有关于第五次全国经济普查统计重点业务综合培训大会上讲话(完整文档)
- 2024-01-20 “严纪律、转作风、保安全、树形象”专题学习教育活动通知(完整文档)
- 2024-01-20 2024XX区住房城乡建设工作情况汇报
- 2024-01-20 2024高校思政教育交流材料:善用反腐败斗争这堂“大思政课”(精选文档)
- 2024-01-20 2024年主题教育专题党课辅导报告,(4)
- 2024-01-20 关于赴某地学习考察地方立法工作情况报告(范文推荐)
- 2024-01-20 2024年度关于增强党建带团建工作实效对策与建议(精选文档)
- 2024-01-20 教师演讲稿:春风化雨育桃李,,潜心耕耘满芬芳(全文)
- 2024-01-20 主题教育第二阶段来了
- 2024-01-20 2024年度关于到信访局实践锻炼个人总结【完整版】
- 搜索
-
- 打赌输了任人处理作文1000字7篇 05-12
- 当代大学生在全面建设社会主义现代化强 05-12
- 全面建成社会主义现代化强国的战略安排 03-10
- 个人廉洁自律方面存在的问题及整改措施 05-12
- 谈谈青年大学生在中国式现代化征程上的 05-12
- 2022年党支部第一议题会议记录(全文完 11-02
- 作为青年大学生如何肩负时代责任6篇 05-12
- 村党组织建设现状及工作亮点存在问题与 05-12
- 全面从严治党,自我革命重要论述研讨会 05-12
- 产业工人队伍建设改革(全文完整) 10-31
- 11-25国庆70周年庆典晚会 庆典晚会串词
- 11-25办公室礼仪的十大原则 浅谈办公室的电话礼仪
- 01-17用心灵轻轻地歌唱_心灵的歌唱
- 01-17也许你不是我一生的唯一|也许不是我
- 01-17爱了,请珍惜;不爱,趁早放手|爱就珍惜不爱就放手
- 01-17岁月带走的是记忆,但回忆会越来越清晰|有趣又有深意的句子
- 01-17曾经的美好只是曾经,我只想珍惜身边的人|我只想珍惜你
- 01-18从容不惊 [学会笑眼去看世界,不惊不乍,淡定从容]
- 02-03当代大学生学习态度调查报告
- 02-03常用护患英语会话
- 标签列表
