首页 > 文秘写作 > 毕业设计 / 正文
基于无人机平台的机动式标校系统设计与应用
2023-02-08 13:10:09 ℃陈俊,曾媛,门涛,陆文斌,张天娇,刘柳,周昊苏
基于无人机平台的机动式标校系统设计与应用
陈俊1,曾媛1,门涛2,3,陆文斌1,张天娇1,刘柳1,周昊苏1
(1.上海航天电子技术研究所,上海 201109;
2.宇航动力学国家重点实验室,陕西 西安 710043;
3.中国西安卫星测控中心,陕西 西安 710043)
随着我国航天事业的不断发展,地面卫星测控网也日益完善,呈现出数量多、分布广、频段宽、工作体制多等特点。为提高航天测控装备标校的精度和效率,克服传统标校方式所具有的造价高、操作繁杂等缺点,研制了一套车载机动式、基于无人机(UAVs)平台的航天测控装备标校系统。该系统采用实时载波相位差分定位(RTK)技术,配备多类高度集成小型化目标载荷,可对地面统一测控、雷达和光电装备进行精度鉴定以及日常进行大动态范围标校和训练等工作。首先,介绍了系统的工作原理、系统组成及精度鉴定数据处理流程;
其次,基于外场实验,给出了该系统的鉴定效果;
最后,相较于目前测试性能单一的标校系统,该系统具有集成度高、机动性强、覆盖频段广、可完成性能实验多等优点,有更好的使用和推广价值。
测控装备;
精度鉴定;
无人机(UAV);
标校;
系统设计
近年来,我国航天发射任务量急剧增长[1],航天活动范围也在不断拓展和深入,航天测控装备是与航天器联系的重要设备,准确地掌握和评估其外测精度,是获得高质量航天飞行器轨道测量数据的基础[2]。测控装备外测精度通常分为有塔标校和无塔标校。有塔标校即通过在标校塔上架设合作目标,实现对测控系统的静态检验与鉴定[3-4],此方法受制于标校塔的建设,移动性差,多为低仰角下进行标校,易受环境干扰[5],难以应用于远场标校和活动测控站标校[6-7]。无塔标校通过跟踪测量携带合作目标的标定球、在轨卫星平台等动态目标,运用统计方法估算其测量误差及精度,其缺点为实施工作繁杂、费用高[8],且受限于地理位置和天气[6,9]。
随着无人机(Unmanned Aerial Vehicle, UAV)、卫星导航定位、单机集成等各项技术的不断发展,尤其在全球卫星导航系统(Global Navigation Satellite System,GNSS)不断完善的背景下,实时差分定位(Real-Time-Kinematic,RTK)模式下的定位精度已达到厘米级[10],采用基于RTK测量技术的无人机挂载合作目标,对航天测控装备外测精度进行鉴定,完全可满足精度鉴定工程要求[11]。目前,国内已有就基于无人机平台对S/X/Ka频段测控天线标校和远场测试[3,6-7,12]、雷达动态标校[13-15]和天线远场测试[16]等的理论体系进行的研究,并开展了一些验证实验,证明了基于无人机对测控装备进行标校的应用价值。但现有的标校系统设计多为针对特定测控装备某一种性能进行测试,随着我国测控网的不断发展[17-18],在工程应用方面,其利用率较低。因此,研制具备多种工作体制高度集成的目标载荷、实时精度鉴定数据处理系统、车载可机动式转场等特点的基于无人机的标校系统,具有更好的应用优势和推广价值。
本文介绍了一种基于无人机平台的车载机动式标校系统,区别于现有标校方法,车载方舱实现了系统的机动式运输和转场,配备2种无人机平台和多种目标载荷,可对地面统一测控、雷达和光电装备的动态跟踪性能、工作协调性能、测量数据精度等进行多维鉴定;
高度集成小型化载荷设计和应用数据可视化实时处理软件,使系统实施快捷、操作简单,实现了航天测控装备精度鉴定常态化的工程实践。
1.1 工作原理
基于无人机平台的车载机动式标校系统利用无人机平台搭载小型化测控通信、雷达、光电等目标载荷和GNSS-RTK测量设备,以无人机搭载载荷作为跟踪目标,按预先设计航路飞行,控制中心可远程控制无人机航线、姿态及载荷工作参数,并可根据无人机实时下发的高精度定位及姿态信息,实时解算目标载荷在被鉴定测控装备坐标系下的位置信息,引导被鉴定测控装备跟踪捕获无人机挂载的合作目标获得测量数据。该标校系统工作流程如图1所示。

图1 基于无人机平台的车载机动式标校系统工作流程
任务中和任务后,控制中心对无人机定位、姿态信息经过数据预处理后,将目标载荷在被鉴定测控装备坐标系下的位置信息作为真值,在时间序列上与测控装备跟踪目标载荷所获得的测量数据进行比对,估算测量数据的误差,以此实现对地面测控装备的零值标定和精度鉴定。无人机飞行航线可根据地面测控装备的测试需求进行预先设计,通过挂载不同类型的目标载荷,配合不同地面装备完成包括方向图、相位及跟踪性能等指标和功能的测试。
1.2 系统组成
基于无人机平台的车载机动式标校系统包括无人机分系统、机载载荷分系统、数据处理与监控分系统和载车分系统,如图2所示。

图2 基于无人机平台的车载机动式标校系统组成
1.2.1无人机分系统
标校系统设计如图3所示,无人机分系统包括无人直升机平台、无人直升机测控分系统、多旋翼无人机平台、多旋翼无人机测控分系统,主要技术参数见表1。无人机分系统用于搭载机载载荷分系统中各载荷单机,无人机测控分系统用于无人机飞行遥控、遥测及机载载荷遥控、遥测信息传输。无人直升机平台可同时挂载多种载荷,支持一次性完成多种性能测试实验。轻便小型的多旋翼无人机平台,可快速开展实验。
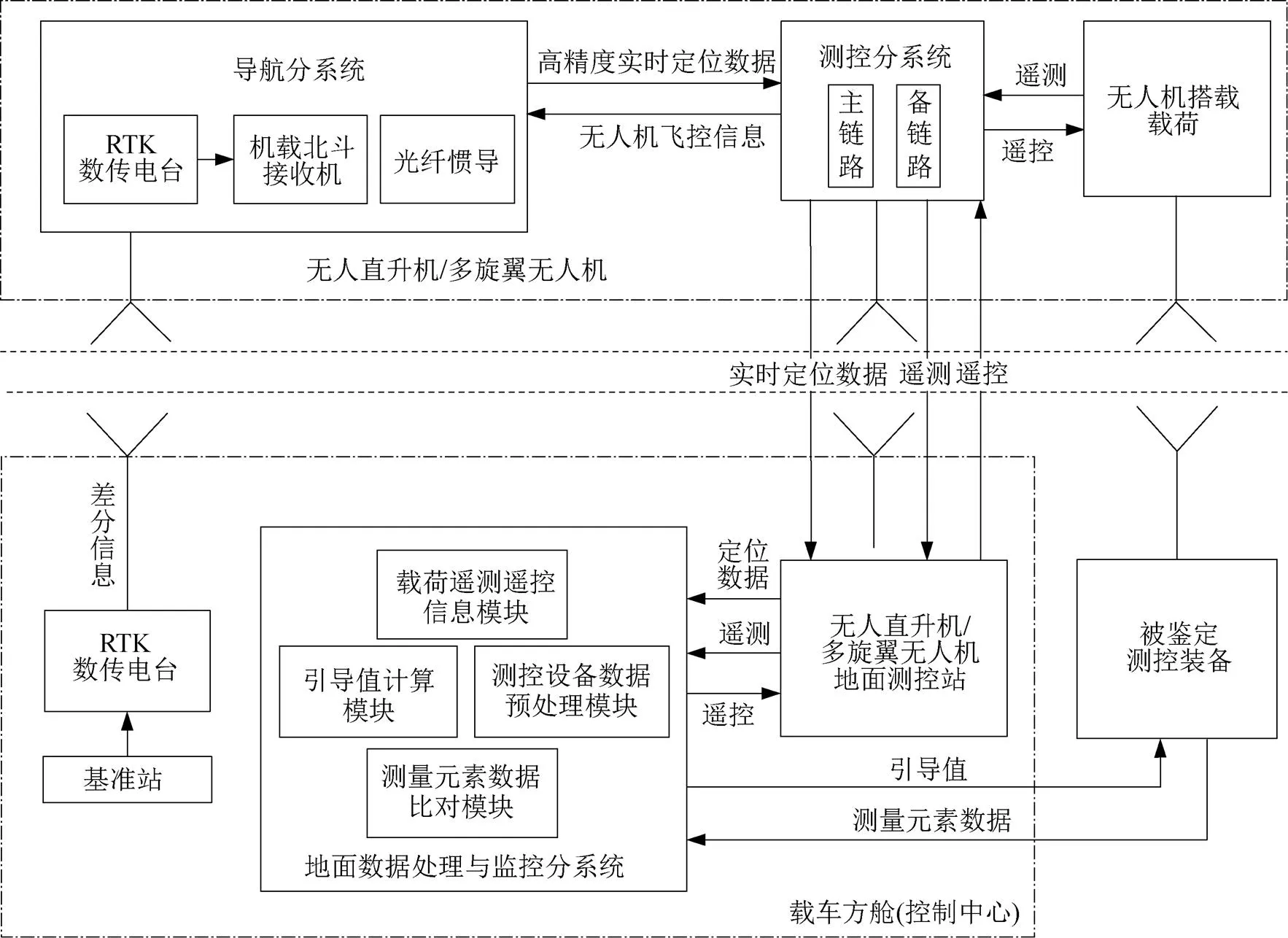
图3 基于无人机平台的机动式标校系统设计框
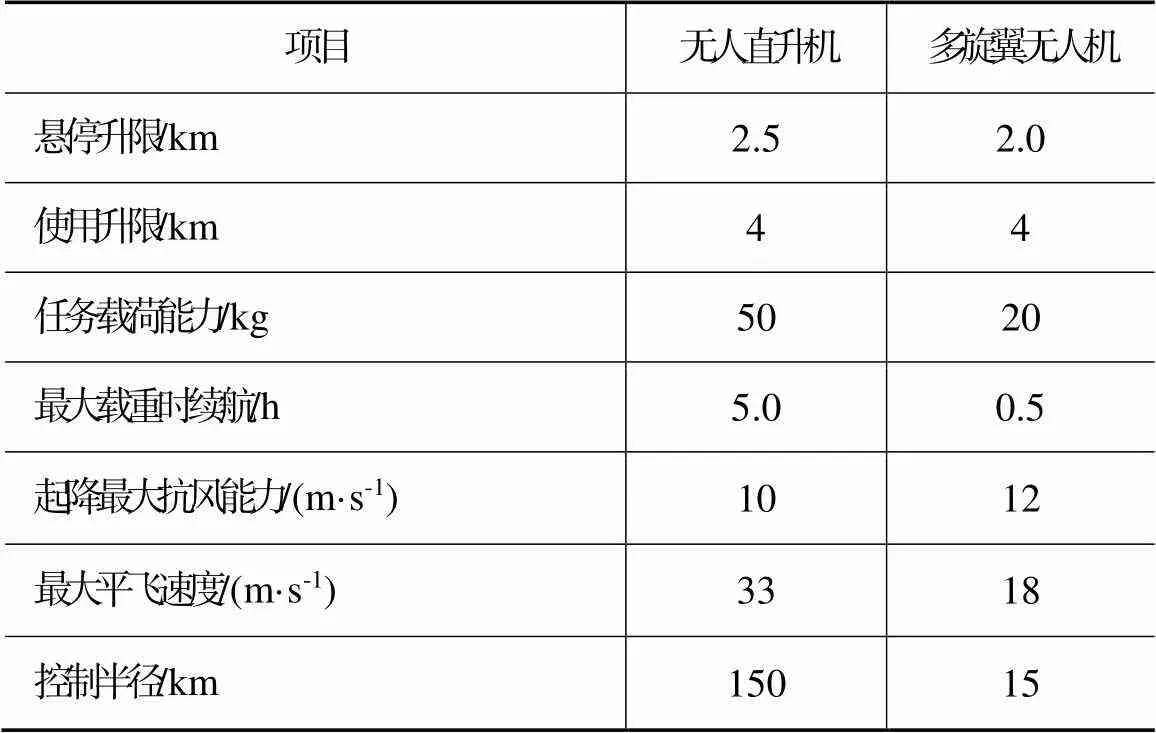
表1 无人机平台技术参数表
无人机平台均集成兼容GPS、GLONASS、BDS及Galileo多系统接收板卡和光纤惯导系统,配备地面差分基准站,支持RTK定位技术,无人机可实时输出高精度定位及姿态信息。
1.2.2机载载荷分系统
机载载荷分系统包括测控通信、雷达、光电等多种载荷。测控通信载荷可覆盖S、C、X和Ka频段,具备标准统一测控、相干扩频、测控数传一体化等多种体制信号的收发能力,具有信标机和校零变频器功能。雷达载荷含C频段脉冲相参应答机、雷达目标模拟器、龙伯球、角反,可配合地面雷达装备完成各种性能测试。光电载荷包含光学信号模拟源,具备对各波段光源的模拟,可配合地面望远镜进行跟踪测试;
配备摄像机,用于勘察、记录试验实况景象。
机载载荷均以小型集成化设计为原则,各载荷天线安装接口、电气接口和通信接口设计一致,在降低系统操作难度的同时,保留了系统的拓展性。
1.2.3数据处理与监控分系统
数据处理与监控分系统用于接收无人机链路实时回传的无人机定位及姿态信息、载荷遥测信息以及摄像机图像信息。可实时发送载荷遥控指令,控制载荷工作模式和参数,实时监测各节点工作状态(图3)。支持与地面测控装备进行光纤通信,可根据无人机定位及姿态信息,实时解算目标载荷位置信息引导测控装备对其进行跟踪捕获。可实时统计分析数据,显示试验参数及曲线,获得测控装备测量元素精度鉴定结果。
1.2.4载车分系统
载车分系统包括载车、方舱和供电设备等。载车可作为整个实验系统的统一承载体,具备沙漠、山地等特殊地貌条件下的工作能力,方便系统的转场和运输,可在野外为设备供电。载车方舱内集成无人机测控分系统、数据处理与监控分系统,并配备指挥调度、时频、数据库服务器、数据转发和处理工作站、交换机等设备,组成控制中心。
精度鉴定的基本方法是以机载北斗/GNSS差分定位结果为标准,通过与被鉴定装备测量数据进行比对和统计检验,鉴定测控装备的精度,确定其系统误差和随机误差,分析掌握其误差变化规律。具体流程如图4所示。
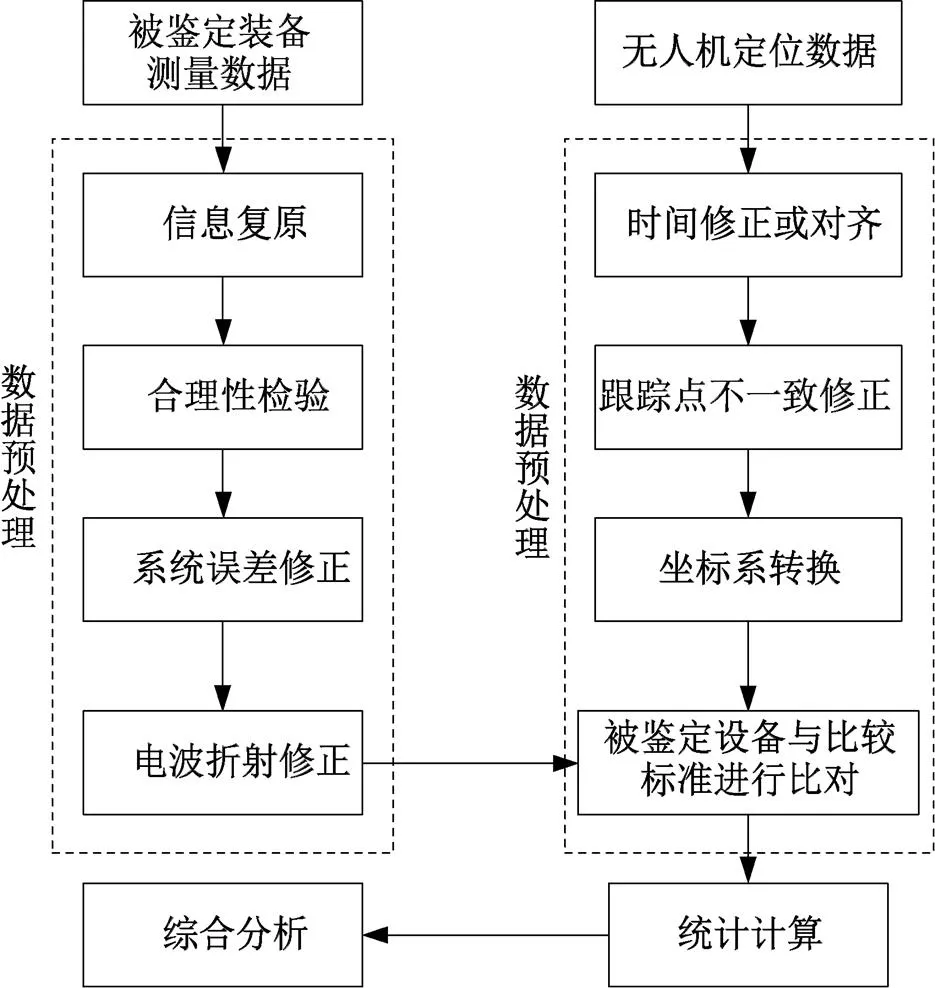
图4 精度鉴定数据处理流程
2.1 数据预处理
精度鉴定数据预处理分为被鉴定装备测量数据预处理和无人机定位数据预处理。被鉴定测控装备测量数据预处理主要包括:信息复原、合理性检验、系统误差修正、电波折射修正[19]。信息复原主要为量纲复原,由测控装备端完成。无人机定位数据预处理包括:以被鉴定装备测量数据时间为准进行时间对齐、跟踪位置不一致修正[20]、坐标系转换[20]。统计分析内容主要包括随机误差、系统误差和总误差。
2.1.1被鉴定测控装备测量数据预处理
1)合理性检验
测控装备测量数据往往带有误差偏大的异常值,会使得测量值失真,影响精度鉴定结果。因此,数据处理时,必须首先对观测数据异常值进行判别和处理,以合理、可信的数据替代它,保证外测数据处理结果的质量。首先采用3σ准则对观测数据异常值进行判别,再运用二阶多项式最小二乘估计拟合曲线对异常值进行修正,详细修正方法见GJB 2234A[21]。
2)系统误差修正
被鉴定测控装备在设计建设完成时,均有对应的系统误差修正模型,因本文应用验证所涉及测控装备类型为统一测控装备,此章节仅介绍统一测控装备的系统误差修正模型,雷达及光学系统误差修正模型详见GJB 1381A[22]。
距离误差修正模型如下:
式(1)和式(2)中的符号是以真值为参考定义的,当测量值比真值小时,误差本身应为“+”号,反之为“-”号。
3)电波折射修正
因大气密度分布不均匀,使得测控装备测量到的距离、俯仰角、方位角等参数都包含了大气折射误差,通常假设大气结构为水平均匀,忽略大气折射对方位角测量数据的影响。本文采用球面分层法对距离和俯仰角进行电波折射误差修正,各层结折射指数根据地面单点大气测量参数按经验公式[19]计算得到。
2.1.2无人机定位数据预处理
无人机定位数据预处理中时间对齐主要方法为:以被鉴定测控装备测量数据序列时间为准,运用拉格朗日三点插值法,对无人机定位数据进行插值,得到与被鉴定装备同时间序列的无人机定位数据。
1)坐标系定义



2)跟踪位置不一致修正


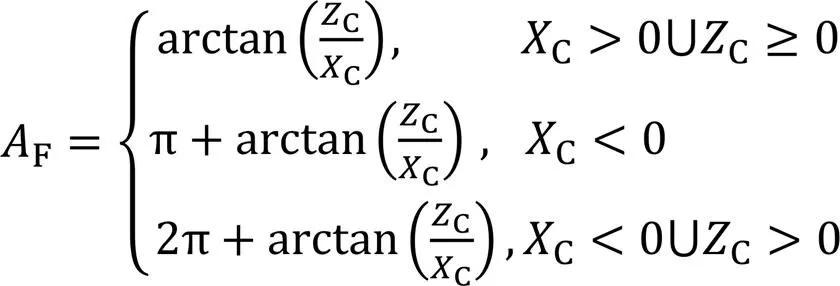
3)坐标转换。
坐标转换的目的是将目标载荷发射天线在WGS-84坐标系下的直角坐标转换至测站系下的球坐标,即与被鉴定装备测量元素所用坐标系一致。主要分为2步,将目标载荷发射天线在地心系下的直角坐标转换至测站系下的直角坐标,再将其转换为球坐标。具体如下:

2.2 精度鉴定误差统计
2.2.1随机误差

由式(10)可得,随机误差的方差估计为
2.2.2系统误差

2.2.3总误差
该实验系统完成后,于2021年在某地统一测控装备上完成了应用验证,具体如下。
3.1 无人直升机定位精度
在进行鉴定实验前,对无人直升机定位精度进行了地面静态定点测试。将定位基准站天线及无人机平台分别放置在不同的大地测量基准点上,由无人直升机定点测试所得的基准点地心距与其实际地心距差值的变化如图5所示,平均偏差为 0.05 m,均方根误差(Root Mean Square Error,RMSE)为0.05 m。由实验结果可知,无人直升机定位精度可达厘米级,满足精度鉴定工程要求。
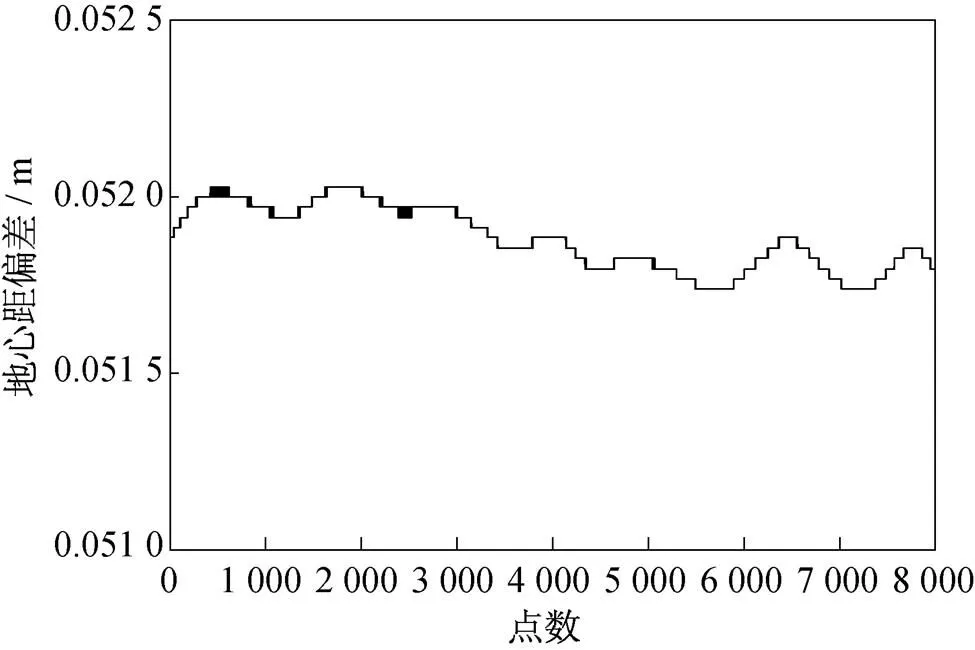
图5 无人直升机基准站定点测试地心距偏差变化
无人直升机静态定点测试时,直升机姿态角变化如图6所示。因直升机放置位置有一定坡度,图6(a)中俯仰角和滚转角并非为0°,直升机所配备惯导系统定姿精度为0.05°。伍德勇等[20]的研究结果表明,精度鉴定系统的定位精度为厘米级,飞机姿态角测量误差控制在1°以内,对系统误差产生的影响可忽略不计,可满足鉴定系统的精度要求。
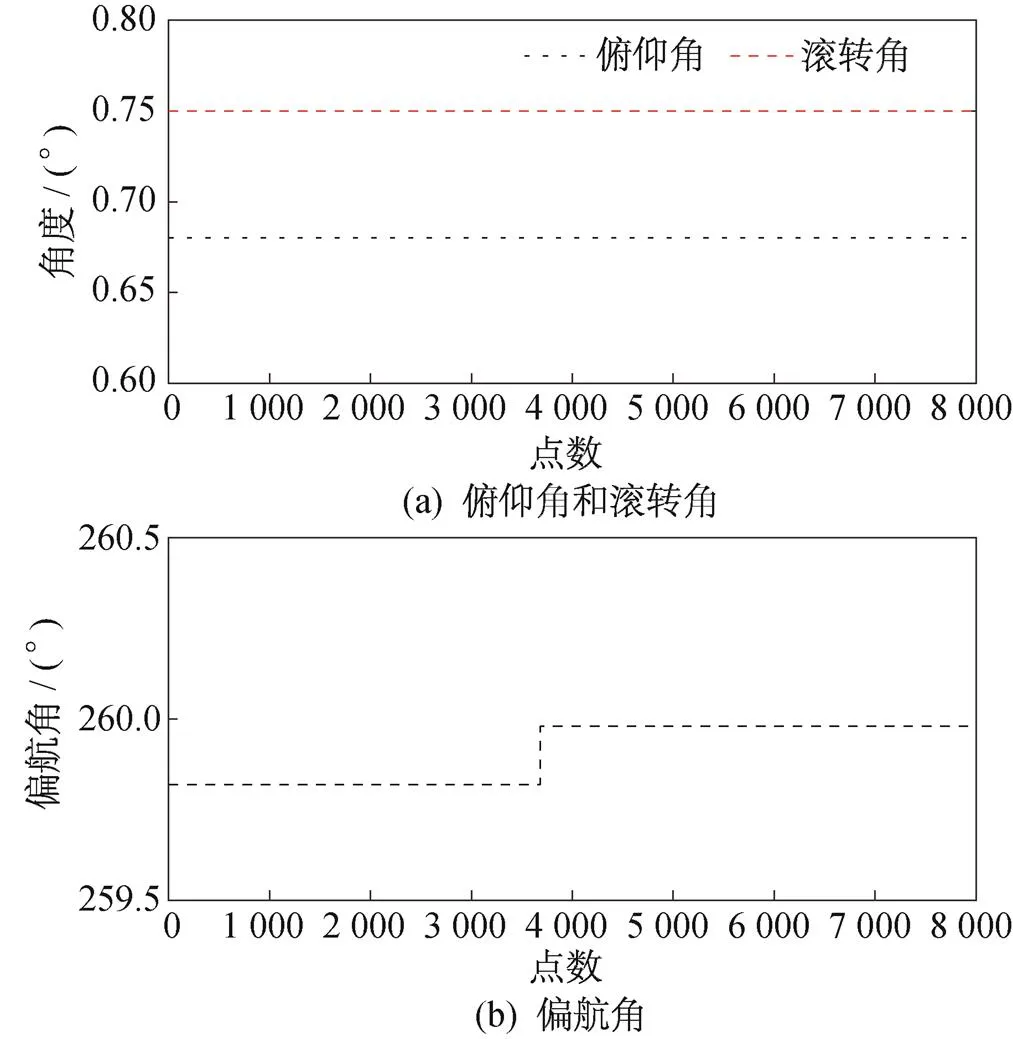
图6 无人直升机地面定点测试姿态角变化
3.2 精度鉴定结果
精度鉴定系统利用无人直升机平台挂载载荷,已对某地面统一测控设备进行了多次标校与鉴定。不同频段地面统一测控设备精度鉴定结果见表2。各频段测量元素误差均满足精度鉴定指标要求,验证了精度鉴定系统的可靠性,其中X和Ka频段测控设备数传体制无测距。

表2 不同频段统一测控装备精度鉴定结果统计
表2中S频段统一测控装备标准USB体制测距(图7)、测角(图8)与标校系统相对真值对比的偏差曲线图,如图7和图8所示。图7中,该实验时间段无人直升机处于悬停状态,测控设备测距值波动较大,无人直升机引导距离稳定,可有效剥离测控装备测距随机差及系统差,测距随机差和系统差分别为1.47 m和2.89 m。

图7 S频段测控设备测距与无人直升机引导距离及其差值曲线
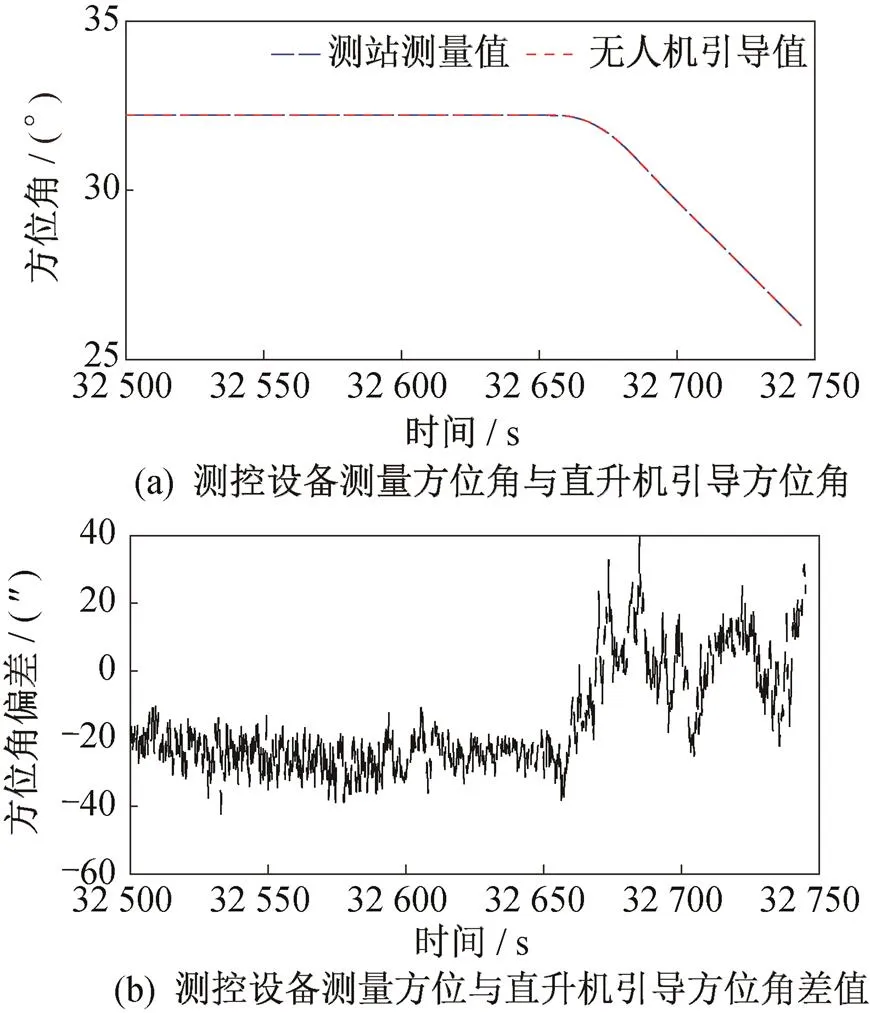
图8 S频段测控设备测角与无人直升机引导角度及其差值曲线
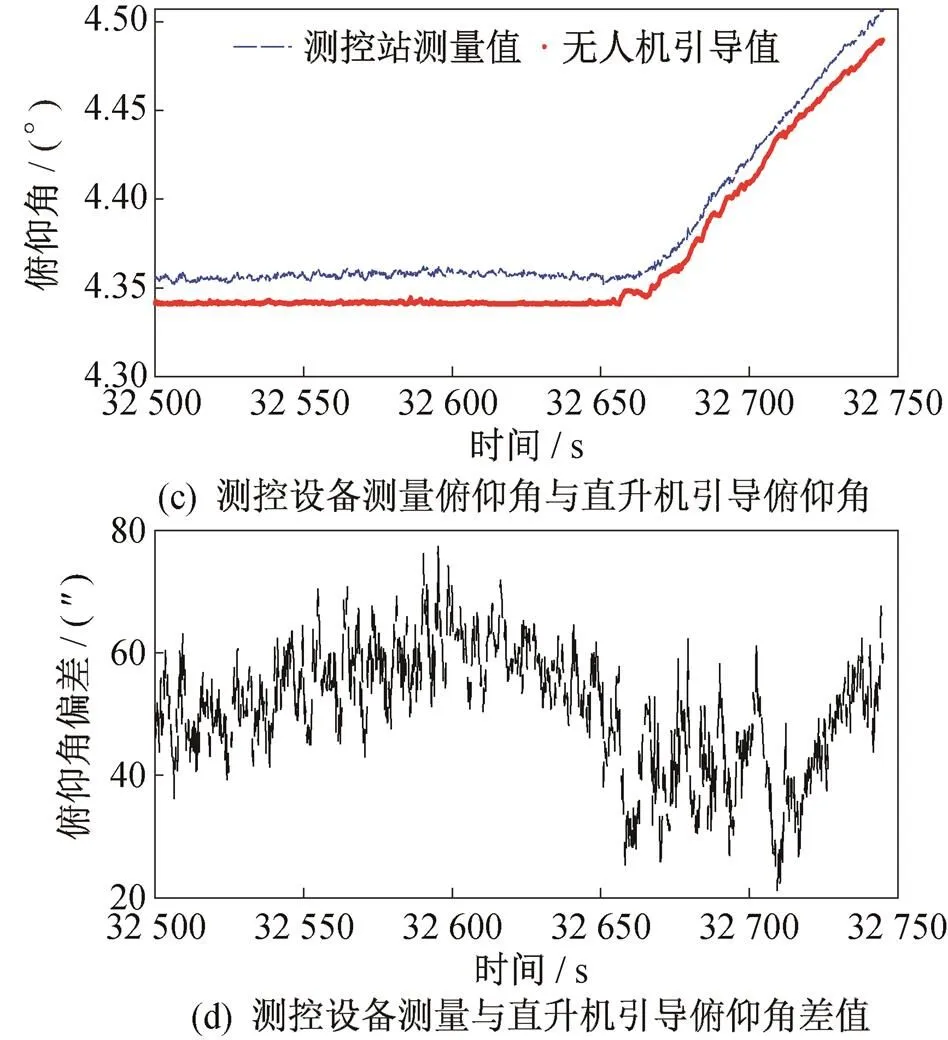
续图8S频段测控设备测角与无人直升机引导角度及其差值曲线
Continued Fig. 8Measured angle curves of TT&C ground system and unmanned helicopter in S-band and their deviation
图8中,无人直升机在此时间段内由悬停状态切换至飞行状态,S频段测控设备与直升机引导角度差值也发生变化,具体表现为:直升机平飞时,图7(b)和图7(d)中角度差值明显小于直升机悬停时角度差值。导致该现象的原因主要是由于直升机在悬停状态下,机身的气动效应无法发挥,且易受外部风干扰等,飞行控制难度较大,直升机位置会发生水平和垂直方向上的漂移[15,23]。图7中无人直升机悬停和飞行状态下的精度鉴定结果见表3,无人直升机悬停时测量角的系统误差较飞行状态时大,无人直升机飞行状态时测量角的随机差较悬停状态时大。由图8及表2可知,测控设备方位角测量误差小于俯仰角误差,因俯仰角测量精度与测距精度相关,测距误差较大时会导致俯仰角误差变大。

表3 无人直升机不同飞行状态下S频段统一测控装备测量角精度鉴定结果
由实验结果可知,基于无人机的精度鉴定系统可用于地面测控设备的精度鉴定,精度满足鉴定实验要求[24]。相对于传统的地面塔标校,基于无人机的精度鉴定系统支持动态测量,更加高效快捷[25]。
本文针对航天测控装备外测数据精度鉴定逐步增加的实际需求,介绍了一种基于无人机平台的车载机动式标校系统的工作原理、设计要点及数据处理流程。该系统作为高精度实时测量系统,具有简便快捷、覆盖全面等优点,实现地面设备精度鉴定的常态化。同时也可作为测控装备操作人员良好的训练与演练系统。
通过分析该系统应用实验的数据表明,该系统精度满足鉴定实验要求,配备的多类载荷可支持多种地面测控装备进行多维精度鉴定实验。系统经过多次外场试验验证后,将会更加广泛应用于其他各类测控装备的标校实验,后续也将积累更多的有效数据用于优化系统设计及算法流程。
[1] 程胜.构建航天软件研制新体系支撑“十四五”航天发展新跨越[J].国防科技工业,2020(9):32-37.
[2] 杨胜斌,和伟辉,刘安,等.北斗系统在设备外测精度鉴定中的应用研究[C]//中国卫星导航学术年会组委会.第十二届中国卫星导航年会论文集.2021:54-59.
[3] 门涛,洪宇,吴宗清,等.基于无人机的测控天线试验鉴定方法[J].空间电子技术,2021(1):75-79.
[4] 杨萍,郭军海,孙刚.航天测控系统卫星鉴定技术研究[J].航天控制,2008,26(1):65-69.
[5] 董建伟,高长生,熊伟,等.脉冲测量雷达无塔标校系统设计[J].计算机测量与控制,2013,21(3):685-693.
[6] 雷鸣.基于无人机平台对地面测控系统校相的设计与实现[J].电子质量,2021(4),50-53.
[7] 李敏剑,王向伟.刘佳伟.多旋翼无人机在某测控设备标校工作中的应用[J].遥测遥控,2021,42(3):26-33.
[8] 陈伟,王志有,李晓斐.航天运载器外测系统精度鉴定技术发展与展望[J].导弹与航天运载技术,2016(6):40-44.
[9] 仇芝.脉冲雷达卫星标定方法的一种工程实现研究[J].飞行器测控学报,2010,29(5),29-33.
[10] 杨泰朋,宣善钦,刘流.基于BDS的RTK模式定位精度分析[J].山西建筑,2021,47(10):170-173.
[11] 金泉,高显忠,郭正,等.无人机集群在机场封控作战中的应用研究[J].飞航导弹,2021(10):52-58.
[12] 解玲娜,王怀.S/X/Ka频段卫星地面站无人机测试标校设计[J].计算机测量与控制,2020,29(1):14-19.
[13] 季勤超,姚申茂,杨利斌,等.基于无人机和差分GPS的舰载雷达动态标校方法[J].计算机与数学工程,2018,46(10):1984-1988.
[14] 朱玉成.动态标校测试系统设计与分析[J].数字技术与应用,2018,36(6):144-145.
[15] 张磊,郑庆利.一种基于无人机的雷达角度零值标校方法[J].中国科技信息,2020(24):68-69.
[16] 居鹏,侯飞.基于多旋翼无人机平台的天线远场测试系统设计[J].现代雷达,2020,42(10):83-85.
[17] 窦骄,韩孟飞,宁金枝,等.小卫星测控通信技术发展与趋势[J].航天器工程,2021,30(6):113-119.
[18] 李赞,李海涛,张哲,等.月球探测任务测控系统总体设计技术研究[J].上海航天,2021,38(2):76-86.
[19] 胡绍林,牛晓雷,许爱华,等.电波折射误差的经验-分层修正算法[J].中国空间科学技术,2003(4):67-71.
[20] 伍德勇.飞机姿态测量误差对测量船校飞精度的影响[J].中国惯性技术研究学报,2004,12(3):58-63.
[21] 刘利生,刘元,张引林,等.光电经纬仪事后数据处理方法:GJB 2234[S].中国人民解放军总装备部,2014.
[22] 刘利生,郭军海,王爽,等.导弹、航天器试验光电经纬仪和脉冲雷达测量精度评定:GJB 1381A[S].中国人民解放军总装备部,2011.
[23] 王弈,曾国贵,廖智麟,等.无人直升机悬停低速段的不确定性仿真验证[J].直升机技术,2014(4):9-13.
[24] 鲍珊,孙浩.基于动态校飞的新型无线电外测系统精度估算[J].测控技术,2013,32(11):51-53.
[25] 周巍,郝金明,徐兆磊,等.基于无人机平台的测控设备精度鉴定系统[J].测绘通报,2013(6):16-18.
Design and Application of Mobile Calibration System Based on Unmanned Aerial Vehicles
CHENJun1, ZENGYuan1, MENTao2,3, LUWenbin1, ZHANGTianjiao1, LIULiu1, ZHOUHaosu1
(1.Shanghai Aerospace Electronic Technology Institute, Shanghai 201109, China;
2.State Key Laboratory of Astronautic Dynamics, Xi’an 710043, Shaanxi, China;
3.Xi’an Satellite Control Center, Xi’an 710043, Shaanxi, China)
With the continuous development of China’s aerospace program, the ground satellite measurement and control network has become increasingly perfect, showing the characteristics such as large number, wide distribution, wide frequency band, and many systems. In order to improve the accuracy and efficiency of the calibration of the aerospace measurement and control equipment and overcome the shortcomings of the conventional calibration method, such as high cost and complicated operation, a vehicle-mounted mobile calibration system based on unmanned aerial vehicles (UAVs) is designed. The system adopts the real-time-kinematic (RTK) mode positioning technology, and is equipped with multiple types of highly integrated miniaturized target loads. It can conduct precision assessment for different measurement and control equipment, and carry out daily large-scale calibration and training. The working principle, system composition, and data processing flow of the precision assessment are introduced. The assessment effect of the system is verified by field measurements. The results show that, compared with the current calibration system with a single test performance, the proposed system has the advantages such as high integration, strong mobility, and wide coverage of frequency bands, can complete many performance tests, and has better use and promotion value.
measurement and control equipment;
precision assessment;
unmanned aerial vehicle (UAV);
calibration;
system design
2022‑05‑27;
2022‑06‑22
陈俊(1994—),女,硕士,助理工程师,主要研究方向为数据处理。
V 556
A
10.19328/j.cnki.2096⁃8655.2022.04.018
猜你喜欢 测控频段直升机 直升机?环球时报(2022-09-15)2022-09-15土耳其T-129攻击直升机军事文摘(2022年15期)2022-08-175G高新视频的双频段协同传输中国传媒大学学报(自然科学版)(2021年1期)2021-06-09gPhone重力仪的面波频段响应实测研究地震研究(2021年1期)2021-04-13昆山祺迈测控设备有限公司中国船检(2020年11期)2020-11-27雷声公司交付首套中频段下一代干扰机航天电子对抗(2019年4期)2019-12-04基于现代测控技术及其应用分析山东工业技术(2016年15期)2016-12-01虚拟仪器技术在农业装备测控中的应用山东工业技术(2016年15期)2016-12-01向着新航程进发——远望7号测控船首航记录太空探索(2016年12期)2016-07-18推挤的5GHz频段CHIP新电脑(2016年3期)2016-03-10- 上一篇:一种新型三角警示牌设计
- 下一篇:副车架设计简述
猜你喜欢
- 2023-11-03 2023年度药学毕业实习总结14篇(完整文档)
- 2023-11-03 毕业工程实习总结系列3篇
- 2023-11-03 毕业大学生实习报告8篇
- 2023-11-03 有关设计类的实习报告6篇(范文推荐)
- 2023-11-03 2023年大专毕业个人实习总结14篇
- 2023-11-02 2023年优秀毕业实习总结11篇【通用文档】
- 2023-11-01 2023年度毕业实习汇报总结15篇(范例推荐)
- 2023-11-01 大学生毕业实训总结报告15篇
- 2023-10-31 大学生毕业实习工作总结13篇
- 2023-10-31 2023年品牌与ci设计5篇
- 搜索
-
- 党课讲稿:坚持政治建警全面从严治警 08-22
- “两新”组织党支部建设标准(试行) 11-11
- 3篇党员学习第三次中央新疆工作座谈会 09-28
- 《工程质量安全手册(试行)》(建质〔 08-26
- 基层党支部民主生活会批复 07-21
- 党员领导干部政治素质个人自评报告(范 06-10
- 党支部纪检委员职责 06-14
- 党支部组织生活会议内容 09-22
- 新任会长在协会换届选举大会上的讲话 03-25
- 工会会员(代表)大会选举办法 03-13
- 11-25国庆70周年庆典晚会 庆典晚会串词
- 11-25办公室礼仪的十大原则 浅谈办公室的电话礼仪
- 01-17用心灵轻轻地歌唱_心灵的歌唱
- 01-17也许你不是我一生的唯一|也许不是我
- 01-17爱了,请珍惜;不爱,趁早放手|爱就珍惜不爱就放手
- 01-17岁月带走的是记忆,但回忆会越来越清晰|有趣又有深意的句子
- 01-17曾经的美好只是曾经,我只想珍惜身边的人|我只想珍惜你
- 01-18从容不惊 [学会笑眼去看世界,不惊不乍,淡定从容]
- 02-03当代大学生学习态度调查报告
- 02-03常用护患英语会话
- 标签列表
