首页 > 心得体会 > 学习材料 / 正文
基于DTC的风力发电系统转矩脉冲时间乘积平衡控制策略
2023-03-01 13:05:06 ℃丁强 ,朱洁 ,江莹旭
(1.南京工业职业技术大学电气工程学院,江苏 南京 210023;
2.江苏省风力发电工程技术中心,江苏 南京 210023;
3.南京交通技师学院机电工程系,江苏 南京 210049;
4.苏州新智机电工业有限公司,江苏 苏州 215156)
在全球化石燃料逐渐枯竭、碳排放日益增长 的大环境背景下,开发利用可再生清洁新能源,摆脱石油煤炭等化石能源的依赖将是我国长期的能源战略[1-3]。目前,在各种新能源形式中,风能作为一种分布广泛的一次能源,在我国电力行业中已经得到了大量的开发利用。
风力发电系统的电机类型一般有永磁同步电机、双馈型异步电机、电励磁电机(EESM)等类型。按照驱动方式也可分为直驱、半直驱和带变速箱的驱动形式[4]。其中,直驱型电励磁电机由于其自身的优势,在风电系统中得到了广泛的应用[5-8]。相比于永磁电机,EESM的优势主要有以下几点:1)随着稀土资源的大量使用,稀土永磁材料价格逐年上升,而EESM通过励磁绕组实现励磁,因此在成本上更加经济;
2)EESM由于励磁可控,在故障状态下可实现可靠灭磁,安全性更高;
3)可通过控制励磁实现深度弱磁,获得更宽的调速范围,在各种风速段均能获得较好的发电性能。虽然其由于转子励磁绕组的原因体积较大,并且存在一定转子损耗,效率略逊于永磁电机,但在体积不敏感的风电场合,直驱型的EESM仍然受到青睐。
目前学术界对EESM的研究集中于对电机模型的研究。文献[9]设计了一种速度观测器,考虑了负载换相模式给速度观测带来的影响。文献[10]设计了一种基于电励磁同步电机的模型观测器,重点分析了负载变化给观测带来的影响。文献[11]基于模型参考自适应系统对电机转速辨识算法进行了研究,通过电压型磁链改进观测模型,简化了实现电流型磁链观测的方法。这些文献均是从EESM模型本身出发做了相关的研究,分析了负载变化、参数影响对模型的影响,但未考虑模型收敛时间对电机动态性能的影响,也没有给出对应的优化方案。文献[12]提到,在高速精轧机的应用中,需要驱动系统对负载快速变化时有着较好的动态响应特性,因此将模型预测控制算法应用于电励磁电机的控制中,提出的单级模型预测控制方法能够避免多级控制带来的短板问题,提高系统的动态响应性能,降低硬件成本并提高系统运行的可靠性。该文献从模型角度优化了转矩响应能力,但在电机的速度外环上的动态性上,和传统方案相比并没有本质区别。
电励磁直驱风机系统构成形式一般如图1所示,风机扇叶通过传动机构直接与电励磁同步电机连接,由于采用了直驱的形式,电机绕组发出的电压频率不固定,无法直接并网,需要通过电力电子器件,先将频率幅值不固定的交流电整流为直流,通过直流母线上的电容滤波后,再逆变为三相交流电,通过LCL滤波器并入电网[13-16]。直流励磁装置为电励磁电机输出可控的恒流励磁,其工作方式原理不一,有的从上述的背靠背中直流母线取电,通过DC-DC变换器输出;
有的从电网取电,通过晶闸管整流输出直流励磁。

图1 电励磁电机风力发电系统拓扑Fig.1 Wind power generation system of EESM
在上述的背靠背结构中,电能通过交-直-交的形式完成并网,其中直流母线作为电机侧和电网侧能量交换的中间环节,其稳定性对整个系统的工作至关重要。当负载侧的电流发生突变时,电机侧和电网侧能量就会发生瞬时的不平衡,导致母线电容上的电压发生抬高或者跌落,如果电机侧在较长一段时间无法响应负载的变化,就会发生母线过压或者欠压故障。因此母线的动态响应能力是系统鲁棒性的一个重要指标,也是本文重点研究的内容。
学界针对此类功率变换器的动态性能问题做出了不少的相关研究。文献[17]分析了变换器直流输出在动态过程中的阻抗稳定的边界,为动态性能分析提供了分析方法和理论基础。文献[18]中将并网逆变器的功率指令前馈至PWM整流器端,通过联合控制获得较好的动态性能。文献[19]在Buck变换器中提出了一种电容充放电平衡控制策略来改善动态性问题。文献[20]又进一步将该策略应用于PWM整流器中。
本文首先在推导EESM数学模型的基础上,介绍了直接转矩控制(DTC)算法的实现原理。然而,虽然DTC在转矩动态响应方面具有天然的优势,但母线电压外环的PI控制器仍然是限制动态性能的瓶颈因素。针对此问题,本文在电机系统中采用电容电荷冲量平衡算法,研究一种转矩脉冲时间积平衡控制算法,理论分析了该算法在电励磁DTC控制下实现的原理,并通过仿真和实验验证了该算法的可行性和有效性。
1.1 EESM数学模型
交流电机的数学模型一般由三组重要的方程构成,分别为磁链方程、电压方程和运动方程。
电励磁电机磁链方程如下:

式中:Ψsd,Ψsq,ΨDd和ΨDq分别为定子磁链和阻尼绕组磁链在d,q轴上的分量;
Ψf为励磁绕组磁链;
Ld,Lq,Lmd和 Lmq分别为同步电感和电枢反应电感在d,q轴上的分量;
isd,isq,iDd和iDq分别为定子绕组和阻尼绕组中的电流在d,q轴上的分量;
if为转子励磁绕组中的直流励磁电流。
需要注意的是iDd,iDq以及if并非是指真实的电流大小,而是经过折合,等效到定子侧的电流大小。式(1)各电感之间满足如下关系:
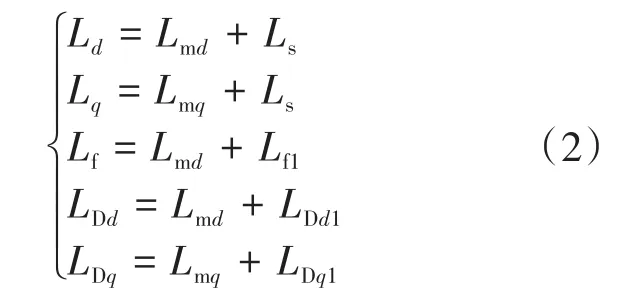
式中:Ls,Lf1,LDd1和LDq1分别为定子漏感、转子漏感以及阻尼绕组d,q轴漏感。
电励磁电机的电压方程如下:

式中:Rs,Rf,RDd和 RDq分别为定子电阻、转子电阻以及阻尼绕组 d,q轴电阻;
Usd,Usq和 Uf分别为定子d,q轴电压和转子绕组电压;
ωr为转子角频率。阻尼绕组由于是闭合绕组,因此端电压为零。同样的,转子和阻尼绕组相关的量均为折合至定子侧的等效值。
电机的电磁转矩以及运动方程表达式如下:

式中:Te为电磁转矩;
TL为负载转矩;
p为极对数;
J为电机惯量。
1.2 DTC算法
DTC算法基本原理在于控制定子磁链幅值恒定基础,通过控制定子磁链与气隙磁链夹角实现对转矩的直接控制。根据磁链方程可以推导得到定子磁链和气隙磁链之间的关系:
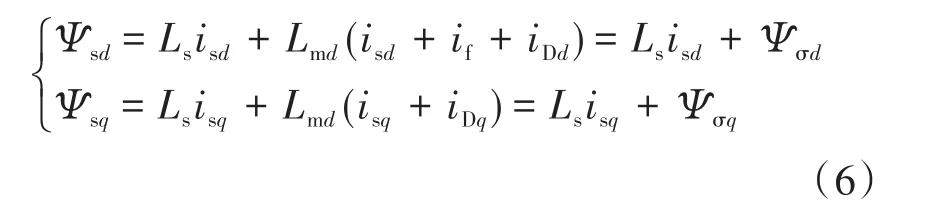
式中:Ψσd,Ψσq为气隙磁链在d,q轴上的分量。
式(6)表明,定子磁链可以表示为气隙磁链和漏磁链之和。进一步的,可以将定子侧电流表示为和磁链相关的表达式:
将式(7)代入式(4),转矩的表达式中可消去和电流相关的量,并转换为和磁链相关的表达式:

式中:θsm为定子磁链和气隙磁链的夹角。
从式(8)可以看到,电磁转矩正比于定子磁链和气隙磁链幅值的乘积,并且正比于二者夹角的正弦值。在电励磁电机中,由于阻尼绕组的存在,当定子侧电流瞬间变化时,阻尼绕组中总是会感应出相应的电流抵消定子电流对气隙磁场的影响,因此气隙磁场的变化相对缓慢,其时间常数往往在百ms级别。相比于开关周期,通常可认为气隙磁链恒定不变,因此可以通过控制定子磁链来控制转矩的大小。根据式(8),可以看出电机的转矩是多变量耦合的系统,为了能实现转矩的解耦控制,可控制磁链幅值保持恒定来减少转矩的影响变量,通过控制定子磁链与气隙磁链的夹角变化来实现对转矩的控制。定子磁链的表达式可以写为

式中:Us,is分别为逆变器输出的三相电压和电流的合成矢量。
考虑到在高速时,定子电阻压降项较小,因此可以近似认为定子磁链是电压的积分。显然,通过选择不同的电压矢量,即可使得定子磁链朝着预期的方向变化。
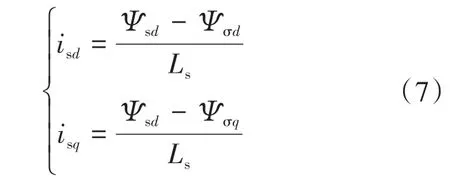
将每个桥臂上管开通,下管关断的状态定义为’1‚,相反的状态定义为’0‚,逆变器的三个桥臂总共会形成8个电压矢量,包括6个有效电压矢量和2个零矢量,各个电压矢量空间分布如图2所示。将磁链所处的扇区按照60°等间距划分为6个区域,以图中定子磁链位于扇区Ⅰ为例,若电机逆时针旋转,由于定子磁链是电压矢量积分形式,因此定子磁链会朝着电压矢量方向变化。当施加电压矢量U6时,定子磁链和气隙磁链的夹角θsm增大,此时电机转矩增大,定子磁链幅值|Ψs|增大;
当施加电压矢量U2,夹角θsm增大,定子磁链幅值|Ψs|增大;
当施加电压矢量 U1时,夹角θsm减小,定子磁链幅值|Ψs|减小;
当施加电压矢量U5,夹角θsm减小,定子磁链幅值|Ψs|增大。因此在选择电压矢量时,需要综合转矩和磁链的变化趋势。

图2 DTC磁链扇区和电压矢量分布示意图Fig.2 Flux linkage sector and voltage vector distribution of DTC
根据上述原理,可以根据定子磁链和电磁转矩的误差讨论,定义两个相关的状态变量ϕ和τ来描述电机当前磁链和转矩与设定值之间的关系。当实际磁链低于目标磁链时,期望实际磁链增大,开关量ϕ的函数值为1,反之则为0。τ本质上为一个转矩滞环比较器,当实际转矩小于目标转矩并且超过一定误差时,期望实际转矩增大,τ取1,反之取-1。为避免开关频率过高,当目标转矩和实际转矩偏差在一定范围内时,期望实际转矩不变化。以上描述可用公式表示为

式中:Ψ*s为定子磁链的设定值;
Te*为转矩的设定值;
ΔT为转矩允许的误差带。
进一步的,可以枚举出在不同状态变量下的开关选择原则,如表1所示。
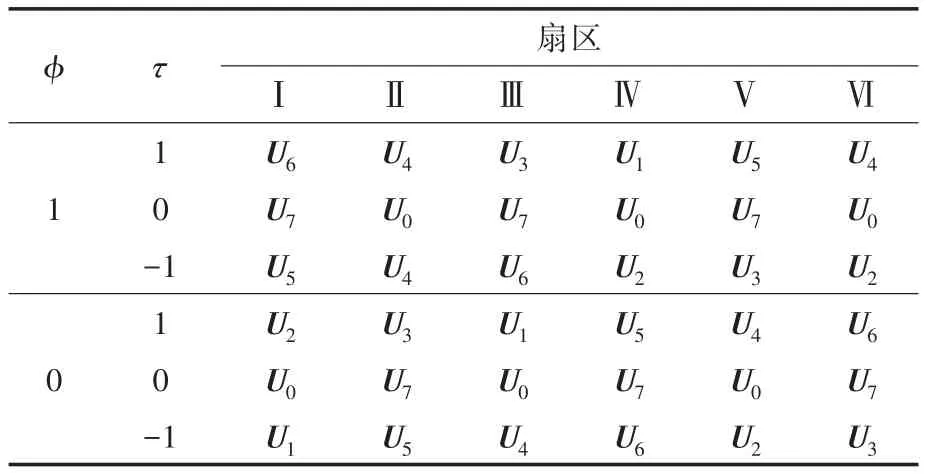
表1 DTC开关矢量选择表Tab.1 Switch vector selection table of DTC
根据上述DTC控制的原理,可以得到风电系统中电励磁电机的控制框图,如图3所示。在该系统中,驱动风机的逆变器工作在能量回馈状态,将电机的机械能转换为电能并馈入母线。为了维持后级系统的正常工作,需要以母线电压恒定为控制目标,因此将给定的母线电压和采样的实际母线电压作差后,通过PI控制器得到转矩设定。磁链观测器和转矩观测器将磁链的幅值相位和转矩信息反馈并做闭环,结合转矩滞环τ和磁链滞环ϕ的输出开关信息,可以选取合适的电压矢量,从而实现转矩的快速跟踪,并最终达到母线电压恒定的控制目标。磁链观测器一般包含定子磁链和气隙磁链观测两部分,其形式一般如图3中Ψs和Ψσ所示,通过对电压矢量的积分换算后计算得到磁链信息。值得注意的是,电励磁的气隙磁链和永磁机的永磁磁链相比而言,其并非是完全恒定的值。虽然从开关暂态的角度而言,其变化缓慢,近似恒定,但从更长的时间尺度看,气隙磁链仍然会随着负载大小的变化而变化,因此需要通过转子侧的励磁电流闭环调节将其控制为恒定值。
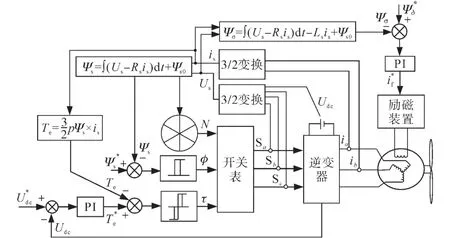
图3 电励磁电机DTC控制框图Fig.3 Control diagram of DTC for EESM
在上述DTC控制环路中,母线电压的动态性能是至关重要的性能。当后级突加或者突卸负载时,母线电压会发生相应的波动。若响应不够快,很容易导致系统过压或者欠压故障,不仅影响自身的安全性,还会造成后级并网逆变器故障停机。由于DTC采用了转矩滞环,也即Bang-Bang控制,因此本质上属于一种时间最优的控制算法,因此在动态响应时间方面,和传统的矢量控制相比具有优势,然而电压外环的PI控制器仍然是限制母线电压响应的瓶颈因素。PI控制器基于误差调节,为获得较好的动态响应,需要将PI参数设置到较为靠近稳定域的边界处,因此不可避免地会产生超调震荡等问题。为了实现母线电压的快速动态响应,本节首先分析负载突变过程中母线电压稳定平衡的条件。
图4给出EESM风力发电系统与后级负载连接方式示意图,用以描述系统动态过程的母线电压调节过程。
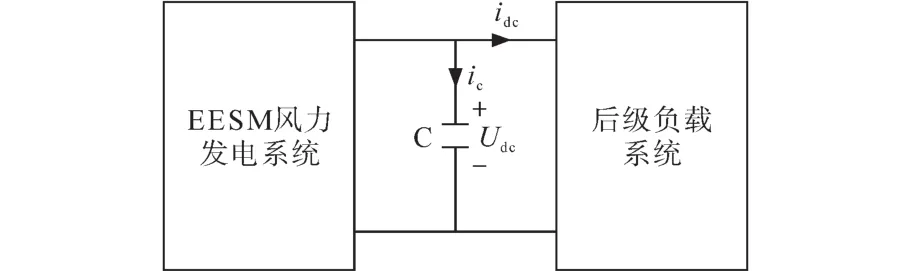
图4 EESM风力发电系统与后级负载连接示意图Fig.4 Connection diagram of EESM wind power generation system and load
假设ts时刻负载突变进入动态过程,te时刻系统重新进入稳态。根据图4和电容充放电压方程可以写出如下方程:

根据能量守恒原则,电机发电功率和母线对外输
出功率相等,因此可以有:

考虑到母线电压闭环控制时Udc(te)=Udc(ts)=Udc,且根据图4,电容电流ic满足:

将式(14)代入式(12)可以得到:

式(15)表明,EESM发电系统对电容C的充电功率(Teωr)与电容C对负载的放电功率(Udcidc)相等是母线电压平衡的条件。
依据上述推导分析,为了提高母线电压控制的动态响应,只需要在负载突变的动态过程中对母线电容C的充放电过程合理控制,使其经过一次充电过程和一次放电过程就达到充放电能量的平衡,便能实现母线电压快速的动态稳定控制。
为便于分析,将后级负载突变等效为前级EESM风力发电系统的负载转矩突变。由于电机工作在发电状态,图5以转速为负、转矩为正为例画出示意图。

图5 负载阶跃突变动态调节过程Fig.5 Transient adjusting process of sudden load step
负载阶跃突变动态调节过程如下:
1)t0时刻,后级突加负载且等效负载转矩为TL。由于EESM发电系统中存在电感,电磁转矩Te需要经历一定调节时间才能跟负载转矩TL平衡。此时母线电容放电提供一部分负载电流,导致母线电压跌落。
2)t1时刻,电磁转矩Te与转矩TL平衡,母线电压停止跌落。由于t0至t1间母线电容处于放电状态,此时母线电压低于设定值。为了使母线电压回到设定值,电磁转矩Te需要继续增加给母线电容提供充电能量(电流)。
3)t2时刻,电磁转矩Te达到整个调节过程中的极大值,如果电机转矩超过该值,则需要在回调过程中花费更多的时间去和负载平衡,无法实现最优。此时母线电压仍未回到设定值。随后电磁转矩Te开始减小,继续给母线电容充电并抬升母线电压。影响电磁转矩Te极大值的因素主要为母线电容的容值和负载转矩的大小。
4)t3时刻,电磁转矩Te和负载转矩TL平衡。母线电容充电结束且母线电压回到设定值。动态调节过程完成。
可以看出,若能保证图5中S1和S2+S3的面积相等,则经过一次动态调节过程就可实现母线电压动态过程的快速稳定调节。而S1=S2+S3的数学描述为

式(16)表明,对于EESM风力发电系统,要实现负载突变过程母线电压快速稳定调节必须满足母线电容C充放电过程中电磁转矩Te的脉冲时间积平衡。欲保证式(16)成立,如何确定动态调节过程的t2和t3时刻是算法实现的关键。将S1=S2+S3改写为如下形式:

式中:m1,m2分别为施加零电压矢量和后退电压矢量时电磁转矩Te的变化率。
依据式(17)以及S2和S3间的比例关系可以得到:

其中,t0时刻可根据负载突变时刻确定;
t1时刻可根据dUdc/dt=0时刻确定,当检测到母线电容电压变化率由负转正时,表明电磁转矩和负载转矩平衡,即可确定t1时刻。于是确定t2和t3关键在于确定m1/m2。
考虑到电励磁电机中存在阻尼绕组,通常采用气隙磁链定向控制策略。将式(3)中的d,q轴下的电压方程转化至m,t轴下并化简得到:

式中:Usm,Ust,ism,ist为参照气隙磁链角度定向后m,t轴上的电压和电流分量;
ωσ为气隙磁链的角频率。
忽略气隙磁链的微分项,式(19)可以化简为

式中:ωs为气隙磁链和转子对应的电角频率之和。依据式(20)可以推导零电压矢量作用时转矩电流表达式,将Usm=0和Ust=0代入并求解微分方程得到:

考虑到转矩电流动态电流调节过程中上升和下降阶段线性度较高,可以近似用直线来替代。假设零电压矢量和后退电压矢量作用时,转矩电流变化量分别为n1和n2,依据式(21)和式(22)可以得到:

考虑到电磁转矩变化率与转矩电流变化率成正比关系,则有

将式(24)代入式(18)可以计算得到t2和t3时刻。在t2时刻之前一直发送零电压矢量,在t2时刻之后发送后退电压矢量,即可使得母线电压经过一次调节后恢复平衡。
为了验证上述算法的有效性,在Matlab/Simulink中搭建了仿真模型验证,仿真所用的EESM参数如下:额定功率PN=5.5 kW,额定电压UN=380 V,额定电流IN=8 A,额定频率fN=50 Hz,额定转速n=1 500 r/min,极对数p=2,定子漏感Ls=0.035 8 H,d轴互感Lmd=0.322 H,q轴互感 Lmq=0.014 8 H,定子电阻Rs=2.5 Ω,阻尼绕组d轴时间常数为376 ms,阻尼绕组q轴时间常数为286 ms。
图6对比了传统矢量控制和DTC控制下的阶跃转矩响应波形。从图中可以看到,DTC的转矩纹波更大,这是DTC特性本身决定的,但本文重点关注动态性能,该问题不在讨论范畴。从动态过程中可以看到,传统矢量控制转矩达到设定值约花费了8 ms,相比而言DTC控制由于转矩采用的是Bang-Bang控制,仅用了约2 ms便跟踪到设定值,体现出了较优的动态性能。
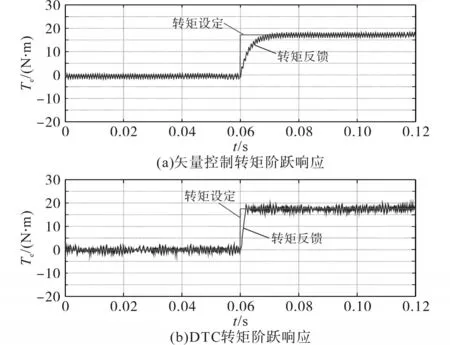
图6 传统矢量控制和DTC的转矩阶跃响应Fig.6 Torque step response of traditional vector control and DTC
当电压外环采用传统的PI控制器时,选取一组较优的PI参数[20]。从图7可以看出,在突加负载的工况下,经过了2个周期的波动后,调节回到了稳态。在整个过程中,电压最大跌落约20 V,调节时间约为55 ms。
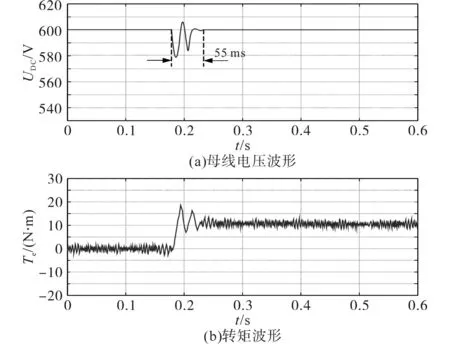
图7 PI控制时突加负载母线电压和转矩仿真波形Fig.7 Bus voltage and torque simulation waveforms of PI controller
图8和图9为电压外环采用了转矩脉冲时间积平衡控制算法时,突加、突卸电机额定负载下的母线电压波形。从图8可以看到,在一次后退电压矢量作用下和一次零电压矢量作用下,母线电压跌落的值仅为7 V左右,调节时间仅为13 ms。图9中突卸负载后,母线向上波动约9 V,调节时间15 ms。相比PI控制,动态性能得到了有效的改善。电压跌落降低为原来的1/3~1/2,调节时间缩短为原来的1/3~1/4。
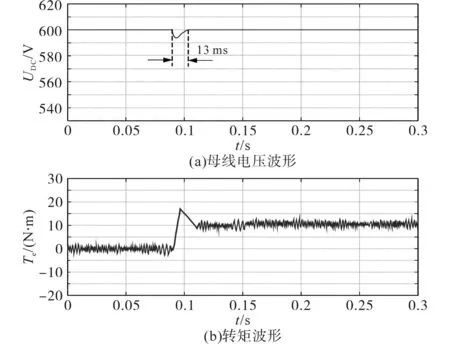
图8 转矩脉冲时间积平衡控制下的突加负载母线电压和转矩波形Fig.8 Bus voltage and torque simulation waveforms of product balance of torque and impulse time when load was increased suddenly

图9 转矩脉冲时间积平衡控制下的突卸负载母线电压和转矩波形Fig.9 Bus voltage and torque simulation waveforms of product balance of torque and impulse time when load was dumped suddenly
为进一步验证算法的可行性,搭建EESM的实验平台,如图10所示,原动机运行在恒转速模式模拟风力机的扇叶,为EESM提供动力。

图10 实验平台Fig.10 Experimental platform
在kp=2.5,ki=0.6时,实验的波形如图11所示,母线电压经过震荡调整后,收敛至稳定值。整个过程的调节时间大约为25 ms,母线电压最大跌落值约为16 V左右。

图11 PI控制时突加负载母线电压和转矩电流实验波形Fig.11 Bus voltage and torque current experimental waveforms of PI controller when load was increased suddenly
通过调节不同的PI参数,可以获得不同的母线电压的动态性能。表2为调整PI参数后的实验结果。可以看出,PI参数加强后,在一定程度上能够减小跌落的电压,但其调节时间显著变长,这是由于震荡次数过多导致。当增大到一定程度后,系统对母线跌落的抑制已经无法起到明显的改善作用,甚至出现无法稳定,出现母线震荡发散的现象。
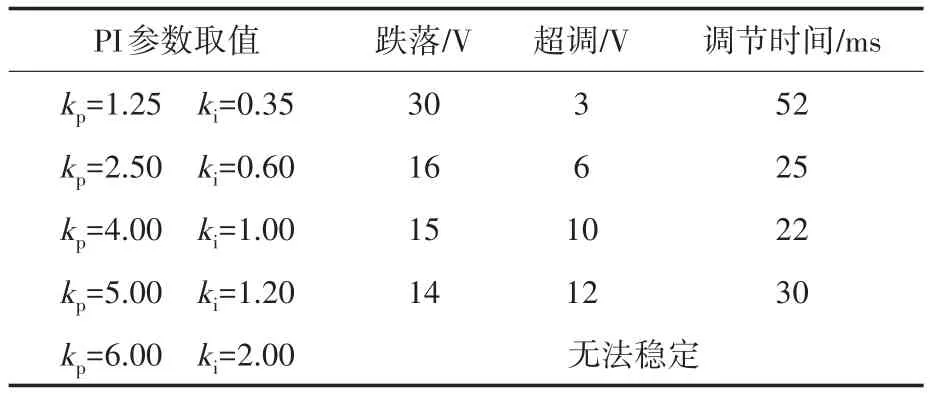
表2 PI控制时的母线动态性能结果Tab.2 Transient performance of bus voltage of PI controller
图12为转矩脉冲时间积平衡控制下的母线电压波形。可以看到突加负载时,定子的转矩电流迅速增大,并通过一次回调使母线恢复稳定。整个过程的调节时间大约为5 ms,母线电压跌落6 V,相比于PI控制,动态性能有了大幅改善。

图12 转矩脉冲时间积平衡控制时突加负载母线电压和转矩电流波形Fig.12 Bus voltage and torque current experimental waveforms of product balance of torque and impulse time when load was dumped suddenly
针对风力发电系统中电励磁发电机控制的动态性能进行深入研究。为了改善背靠背功率变换拓扑中母线电压环节的动态性能,在推导了电机数学模型的基础上,分析了DTC控制的实现原理。为了进一步解决母线电压外环的PI控制器响应慢的问题,研究基于DTC的转矩脉冲时间积平衡控制算法。该算法通过非线性的开关矢量选择,仅需一次调节即可实现电压的恢复稳定。通过理论推导分析了该算法的实现原理,并通过仿真验证了其可行性。最后通过实验对比了转矩脉冲时间积平衡控制和传统PI控制的效果。实验结果表明,转矩脉冲时间积平衡控制能够大大抑制母线电压在负载突变时的波动,起到了较好的动态调节作用。
猜你喜欢 磁链线电压励磁 优化反馈补偿闭环定子磁链观测器微电机(2022年8期)2022-10-12表贴式永磁同步电机模型预测转矩控制系统预测模型研究*电机与控制应用(2022年1期)2022-09-01同步调相机励磁前馈式强励控制方法研究大电机技术(2022年3期)2022-08-06双BP神经网络的永磁同步电机磁链与转矩无差拍控制电机与控制应用(2022年4期)2022-06-27发变组过励磁保护误动原因分析及处理措施河北电力技术(2021年2期)2021-07-29励磁变压器励磁涌流引起的调相机跳闸分析河北电力技术(2021年2期)2021-07-29发电机进相运行时厂用400V母线电压偏低问题分析与处理科技信息·学术版(2021年7期)2021-01-10死区效应对定子磁链观测的影响与抑制研究微特电机(2019年7期)2019-08-02关于《三相交流电源》章节的教学探析课程教育研究·学法教法研究(2018年20期)2018-08-11基于励磁阻抗变化的变压器励磁涌流判别方法的探讨电子制作(2018年1期)2018-04-04猜你喜欢
- 2024-01-20 有关于第五次全国经济普查统计重点业务综合培训大会上讲话(完整文档)
- 2024-01-20 “严纪律、转作风、保安全、树形象”专题学习教育活动通知(完整文档)
- 2024-01-20 2024XX区住房城乡建设工作情况汇报
- 2024-01-20 2024高校思政教育交流材料:善用反腐败斗争这堂“大思政课”(精选文档)
- 2024-01-20 2024年主题教育专题党课辅导报告,(4)
- 2024-01-20 关于赴某地学习考察地方立法工作情况报告(范文推荐)
- 2024-01-20 2024年度关于增强党建带团建工作实效对策与建议(精选文档)
- 2024-01-20 教师演讲稿:春风化雨育桃李,,潜心耕耘满芬芳(全文)
- 2024-01-20 主题教育第二阶段来了
- 2024-01-20 2024年度关于到信访局实践锻炼个人总结【完整版】
- 搜索
-
- 打赌输了任人处理作文1000字7篇 05-12
- 当代大学生在全面建设社会主义现代化强 05-12
- 全面建成社会主义现代化强国的战略安排 03-10
- 个人廉洁自律方面存在的问题及整改措施 05-12
- 谈谈青年大学生在中国式现代化征程上的 05-12
- 2022年党支部第一议题会议记录(全文完 11-02
- 作为青年大学生如何肩负时代责任6篇 05-12
- 村党组织建设现状及工作亮点存在问题与 05-12
- 全面从严治党,自我革命重要论述研讨会 05-12
- 产业工人队伍建设改革(全文完整) 10-31
- 11-25国庆70周年庆典晚会 庆典晚会串词
- 11-25办公室礼仪的十大原则 浅谈办公室的电话礼仪
- 01-17用心灵轻轻地歌唱_心灵的歌唱
- 01-17也许你不是我一生的唯一|也许不是我
- 01-17爱了,请珍惜;不爱,趁早放手|爱就珍惜不爱就放手
- 01-17岁月带走的是记忆,但回忆会越来越清晰|有趣又有深意的句子
- 01-17曾经的美好只是曾经,我只想珍惜身边的人|我只想珍惜你
- 01-18从容不惊 [学会笑眼去看世界,不惊不乍,淡定从容]
- 02-03当代大学生学习态度调查报告
- 02-03常用护患英语会话
- 标签列表
