首页 > 心得体会 > 学习材料 / 正文
核电工程BIM一体化测量技术研究及应用
2023-05-08 13:10:09 ℃屈 璐
(中国核工业二四建设有限公司,福建 漳州 363000)
核电工程具有建筑规模庞大、施工周期长、工艺及结构复杂、安装物项精度要求高等特点,目前核电工程测量依旧沿用传统的测量技术,存在工作效率低、劳动强度高、信息化程度低、过度依赖操作人员经验及技能水平、容易受施工环境影响等现象,一定程度制约着核电工程土建施工技术的提升,难以满足现阶段核电工程施工需求。为了满足核电工程的高标准、严要求,工程测量技术需不断改进创新,在保证安全与质量的前提下提高工效。通过将BIM技术与GPS RTK测量技术、全站仪ATR自动瞄准技术相融合,并设计开发与之匹配的测量数据处理系统,制定先进科学的工艺流程,实现BIM一体化测量技术,该技术自动化、信息化程度高,极大的降低了施工测量劳动强度、人员数量以及对操作技能水平的依赖,提高了外业测量效率、内业数据处理效率,可快速完成复杂建筑现场仪器架设及施工测量,受施工环境制约影响小,并保证施工安全与质量。
1.1 BIM与测量结合运用方面
核电工程测量主要基于蓝图进行现场定位放样,蓝图转化通常采用2D模式绘图,即CAD二次绘制蓝图,结合图纸建筑坐标系提取各施工物项设计控制坐标点,通过全站仪进行现场轴线定位放样或者安装调测。由于核电工程建筑结构复杂、工程量庞大、高精度安装物项多,传统方式不易发现存在定位物项冲突的情况,事前控制难度较大。基于BIM三维建筑模型在施工现场完成自动化的定位放样和检测,突破传统的2D、图纸化作业的方式,实现3D直观测量模式,不仅能提高作业效率与精度,而且大大降低传统测量方式人为操作错误风险,对人员操作技能水平依赖程度低。
1.2 GPS RTK技术与全站仪测量技术融合方面
核电建筑土建施工阶段测量工程量主要分为三个项目,即:定位放样、安装调测、地形测量,分别占测量总工程量70%、20%、10%。地形测量一般在室外,受施工环境影响小,定位放样与安装调测本层施工大部分情况下在建筑物上层楼板或屋面施工前完成,只有大约不到20%的设备基础、孔洞在完全封闭后施工。采用传统的全站仪极坐标法[3]测量,需要提前引入基准点,并保证基准点间测量通视,往往会受到现场施工环境的制约,设站定向不灵活。若采用传统GPS RTK模式,又会存在坐标精度不足的问题,不满足现场施工要求。通过建立GPS基准站系统(简称CORS),提高GPS RTK载波相位差分精度,采用专业测量设备及配套软件将全站仪与GPS接收机或电台手柄相连接,通过测量电子手簿控制。使用时可将BIM建筑模型进行匹配、转化后直接导入电子手簿,可直接显示三维图形,根据任务需要在电子手簿中选取测量点位获取设计数据,通过电子手簿控制全站仪完成自动化定位放样工作,根据现场环境可选用“基准模式”和“任意模式”。
1.3 测量数据信息化处理方面
传统测量资料编制,都需要现场人工记录原始测量数据,现场作业完毕后,采用人工录入的方式编制测量资料,一方面内业作业效率低容易出错;
另一方面内外业不同步,无法第一时间向监理单位报送正式资料,往往存在1天左右的间隔。通过结合BIM一体化测量技术开发数据生成系统,将全站仪、GPS、电子水准仪现场采集的测量数据直接通过软件实现依据不同的资料模板,自动化生成标准资料,改变传统人工编制资料的模式,降低人工编制资料工作量,杜绝人工录入错误造成资料退回,引起制约现场施工的情况,提升内业资料工作效率与质量。
2.1 作业前技术准备
实施前技术准备包括:单基站CORS建立、BIM建筑模型绘制、测量主要仪器及设备检校、BIM建筑模型与仪器设备的加载、匹配、转化。
2.1.1 单基站CORS建立
首先建立CORS系统,提高GPS RTK载波相位差分精度和数据稳定性[1]。考虑到建筑规模,一般在半径5 km范围场地采用单基站CORS,5 km范围内数据解算精度可始终保持在3 mm以内,5~10 km开始精度衰减,此时对精密工程不再适用,超过10 km后精度衰减至1 cm,只能用于地形测量。单基站CORS布局灵活、结构简单、即建即用一次安装调试完毕后,可连续运行10年以上,期间在使用过程中根据解算精度的变化每隔2~3年进行一次校正即可。
该环节重点在于调试,核电工程单基站CORS基站点的平面位置按照B级GPS精度、高程按二等水准精度要求施测[4]。平面坐标系统与高程系统根据工程设计要求选用一次建立完成,平面控制采用GPS静态测量边连式构网,使用3台GPS接收机同步观测两个时段联测至少4个以上次级控制网基准点,[5]高程控制利用至少3个以上次级控制网点起算。在测量过程中基准站和流动站GPS接收机接收卫星数量均不小于5颗,且获得初始化定位时方可进行测量,测量数据均在固定解状态下,并且测量置信度为99.9%,为保证测量精度,联测时每个点位观测不少于3 min,结果采用三维无约束平差确定建立单基站网络RTK模型。
2.1.2 BIM建筑模型的绘制
BIM建筑模型的深度和细化要求必须要满足测量定位放样,建筑结构内各施工物项必须与设计图纸一致,包括数量、尺寸、精度,这是实现无蓝图实时测量的基础。需要测量技术员与BIM工作小组成员进行沟通交流,明确需求和目的,或者由专业测量技术人员对初版的BIM建筑模型进行深化补充。
绘制的BIM建筑模型无需考虑坐标系问题,只需根据设计图纸的各物项相对位置关系绘制即可,在具体使用时进行坐标系的匹配和转化。
2.1.3 测量主要仪器及设备检校
所用全站仪必须得到国家相关检定机构检定,并获得检定合格证书。每隔3个月按照说明书进行常规“三轴误差”检校工作, 所使用的GPS接收机及手簿必须得到国家相关检定机构检定,并获得检定合格证书。[2]每隔3个月按照说明书进行常规信号连接、系统稳定性、解算参数的检查、校正。
2.1.4 BIM建筑模型与仪器设备的加载、匹配、转化
BIM建筑模型通常采用相对关系绘制,并且绘制属性为块,不具备坐标性质和端点、节点实时捕捉性质,导致电子手簿无法识别,故此需要对BIM建筑模型进行处理,满足使用要求。
(1)图形属性变更
BIM图形属性变更需要采用CAD2010及以上版本进行处理具体,工作流程为:图形导入→图形分解→图形另存。
图形导入:图形导入CAD后切换三维视图模式检查是否存在数据丢失情况,必须保证图形的完整性。
图形分解:将三维图形全选后,采用分解选项将三维图形的块属性变更为点、线、面属性,分解后还需在图形特性中进行检查是否全部分解完毕,否则在后续导入电子手簿使用时,将无法选中端点坐标进行定位放样。
图形另存:图形分解后另存为DXF格式,另存名称不能出现中文,只能采用数字或英文模式,否则在导入时将无法识别图形文件。
(2)坐标系匹配
由于建筑模型为相对尺寸,不具备绝对位置的坐标系功能,此时需要对完成分解的三维模型进行自定义坐标系,并修正方位角。以设计图纸中的建筑坐标系设置自定义圆点,并将设计图纸中的施工角度换算为测量方位角,完成三维模型的平移、旋转、匹配,完成后对图形中各节点进行坐标检查,确定数据正确无误。需要注意的是,在转化时检查三维图形的绘制单位,按照原图的绘制单位进行自定义坐标系。
(3)图形加载
将校正后图形DXF文件导入电子手簿,导入时可通过SD卡、U盘、蓝牙多种方式,通过制定的专业软件实现一键式加载,可在电子手簿中直接进行图形3D浏览,任意选择建筑物项坐标进行现场定位放样工作。生成电子手簿3D模型界面如图1所示。

图1 电子手簿3D模型界面Fig.1 Electronic hand thin 3D model interface
2.2 外业测量
定位放样与安装调测项目根据现场施工环境,可选用基准模式或任意模式。地形测量可直接采用GPS RTK基于CORS站进行地形测量。
2.2.1 基准模式
作业步骤:设备连接→新建项目→参数设置→设站定向→定位放样(或者安装调测)。
设备连接:首先智能全站仪与电台手柄连接,然后将电子手簿采用长距离TS信号与全站仪连接,实现实时通讯与控制,此时全站仪将无需人员操作,只需用电子手簿控制。
新建项目:根据工作任务新建工作项目,将技术准备阶段的BIM图形保存在新建项目中,此时需注意新建项目的坐标单位同BIM图形坐标单位一致。启动基于BIN的智能施工放样软件,进入任务后可直接显示放样的BIM模型。
参数设置:直接通过电子手簿设置全站仪测量参数:目标、定位放样限差、导向光模式、导向光功率、温度、气压等基本常数。
设站定向:在测站处根据通视条件与基准点位置选择后方交会法设站或已知点设站。
后方交会法设站属于任意点设站,现场使用灵活方便,当无法在已知基准点上架设全站仪时采用。已知点设站属于基础方法,必须在已知基准点架设全站仪。必须满足已知基准点间通视要求。根据现场环境由作业人员选用设站。
定位放样:当设站完成后,此时电子手簿中的三维图形会显示全站仪的位置,电子手簿与360°棱镜安置在同一根对中杆上,通过电子手簿可在三维图形中选取需要定位放样的点位,当选择棱镜模式后,全站仪将自动旋转到正确坐标的方向上,此时移动棱镜到全站仪指向的方位,全站仪自动开启搜索模式,并锁定棱镜,同时在电子手簿上显示此时棱镜相对于定位放样点理论坐标的位置关系,根据向前、向右、向上的提示移动棱镜到限差容许的位置,完成该定位放样点的工作并记录保存实测坐标点。随后采取同样的方式完成其他点位的定位放样工作。当选择激光模式后定位放样,选取设计点位后,全站仪镜头会自动旋转到设计坐标位置,同时会发射可见激光,移动棱镜到激光位置,即可完成对该设计点位的定位放样工作并保存数据,随后完成其他定位放样工作,如图2所示。
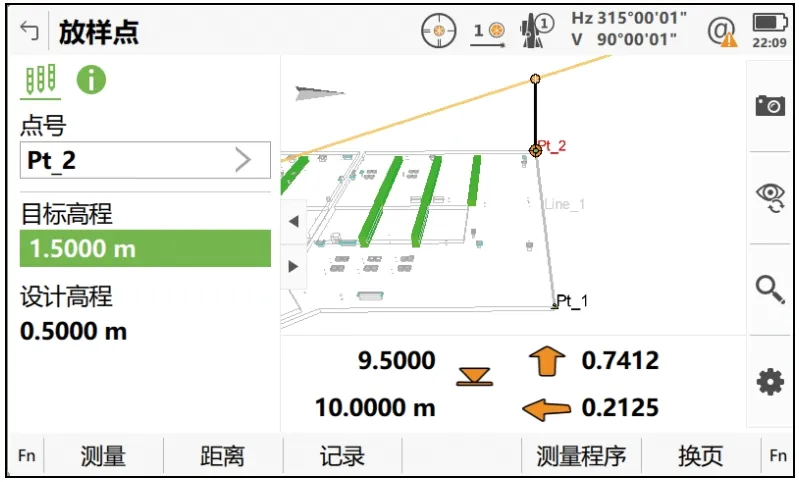
图2 电子手簿3D模型界面图Fig.2 Electronic hand thin 3D model interface diagram
安装调测:以核电工程安装调测工程量最大的钢衬里贯穿件为例,其他物项调测方式方法与思路与此一致。设站完毕后,手簿中会显示全站仪与贯穿件的位置,电子手簿不与棱镜杆相连,360°棱镜与调测专用的小棱镜杆相连,将其安置在贯穿件分出的中心点。作业人员站在需调测的贯穿件一旁,手持电子手簿,在三维图形中选取该贯穿件设计坐标点,全站仪将自动旋转到正确坐标的方向上,全站仪自动开启搜索模式,并锁定棱镜,同时在电子手簿上显示此时棱镜相对于定位放样点理论坐标的位置关系,手动开启实时跟踪测量,根据电子手簿中显示向前、向右、向上的提示距离,告知安装人员调整贯穿件位置。待贯穿件调整完毕后,记录保存最终调测合格后的数据,如图3所示。
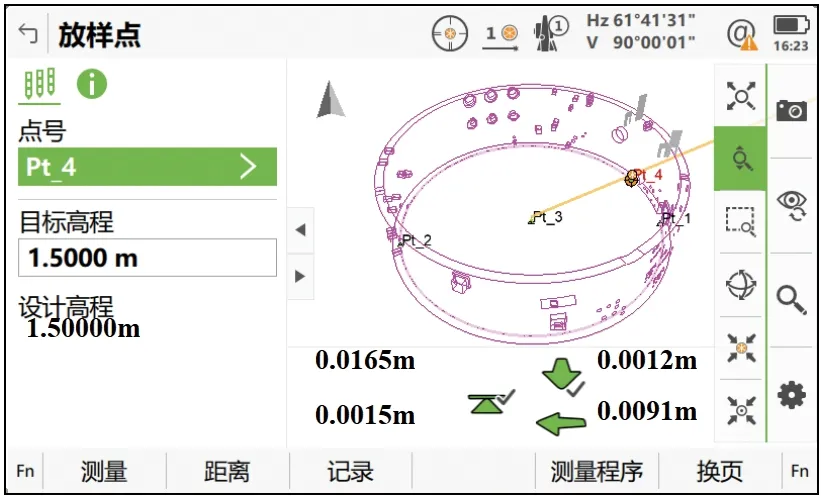
图3 电子手簿中贯穿件位置调整模型距离图Fig.3 Model distance diagram for the position adjustment of penetrators in electronic hand book
2.2.2 任意模式
任意模式与基准模式根本的区别在于无需设站,可在现场非封闭环境的测量区域进行任意架站,充分运用COSR站的高精度,使全站仪在任意位置都可自动获取设站基点,使用更加灵活。
全站仪在测区任意位置进行架设仪器,无需任何基准点。电子手簿进入设站界面,将GS模式切换为GPS模式进行坐标快速采集,分别在测区任意采集3~4个点的GPS数据,而且这些点是任意点,无需标记点位,每次测量一个GPS点后,即可通过电子手簿快速搜索全站仪(可以利用超级搜索首先寻找棱镜,再利用搜索并跟踪功能锁定棱镜)并远程控制全站仪对360°棱镜进行观测,用于获取后方交会的距离和角度。通过GPS在测区采集的任意点,同时通过全站仪快速测量棱镜,获取数据参数后,即可计算出全站仪的架站坐标和方位角,快速完成复杂建筑现场的全站仪架设,而且是任意点,无需考虑现场的堆积物,只要找到空地即可架站。
基准模式适用于已提前引入基准点的各类施工环境,尤其是在地下室、建筑物内等GPS信号弱的封闭环境。而任意模式是在基准模式的基础上进行了改进,特别适用于非封闭环境、缺少基准点或基准点被破坏、GPS信号良好等场景。
2.2.3 内业资料编制
内业资料编制工作是通过用于配套BIM一体化测量技术开发的数据生成软件实现,主要目的是将全站仪、GPS、电子水准仪现场采集的测量数据,直接通过软件实现依据不同的资料模板,自动化生成标准资料。改变了传统人工现场记录原始数据,编制时人工比照原始数据录入的模式,更加简单快捷。并且通过自定义网络传输,可实现紧急施工现场定位放样与资料编制同步进行。测量的同时,保存在仪器中的数据通过自定义的网络传输上传至软件,现场测量任务完成的那一刻,数据同时已全部上传完毕并生成标准资料,实现内外业真正意义上的同步。
核电工程一体化测量技术,将BIM与智能型全站仪集成应用,通过对软件、硬件系统性整合,结合核电实际工况进行适应性优化和匹配,将BIM模型代入施工现场,利用模型中的三维空间坐标数据驱动全站仪进行测量,真正实现无缝的数据流,实现快速控制、放样、资料生成一体化,改变了传统的极坐标法定位放样模式,可适应更加复杂的现场环境,保证施工测量质量,缩短了施工工期,为类似后续核电厂工程测量提供了参考样板。
猜你喜欢棱镜全站仪图形分配正义:以弱势群体为棱镜天水行政学院学报(2022年4期)2022-11-18全站仪极坐标法监测点稳定性分析方法研究水电站设计(2020年4期)2020-07-16大棱镜泉即景少儿美术(快乐历史地理)(2020年4期)2020-02-24基于快牙平台实现全站仪与计算机的数据通信工程与建设(2019年3期)2019-10-10大棱镜温泉学苑创造·A版(2019年4期)2019-05-10分图形小学生导刊(低年级)(2016年8期)2016-09-24找图形小学生导刊(低年级)(2016年5期)2016-05-27基于全站仪二次开发的覆冰厚度测量与实现电测与仪表(2016年9期)2016-04-12图形变变变幼儿智力世界(2015年1期)2015-08-17基于Mathematica改进双棱镜干涉实验物理实验(2015年8期)2015-02-28猜你喜欢
- 2024-01-20 有关于第五次全国经济普查统计重点业务综合培训大会上讲话(完整文档)
- 2024-01-20 “严纪律、转作风、保安全、树形象”专题学习教育活动通知(完整文档)
- 2024-01-20 2024XX区住房城乡建设工作情况汇报
- 2024-01-20 2024高校思政教育交流材料:善用反腐败斗争这堂“大思政课”(精选文档)
- 2024-01-20 2024年主题教育专题党课辅导报告,(4)
- 2024-01-20 关于赴某地学习考察地方立法工作情况报告(范文推荐)
- 2024-01-20 2024年度关于增强党建带团建工作实效对策与建议(精选文档)
- 2024-01-20 教师演讲稿:春风化雨育桃李,,潜心耕耘满芬芳(全文)
- 2024-01-20 主题教育第二阶段来了
- 2024-01-20 2024年度关于到信访局实践锻炼个人总结【完整版】
- 搜索
-
- 打赌输了任人处理作文1000字7篇 05-12
- 当代大学生在全面建设社会主义现代化强 05-12
- 全面建成社会主义现代化强国的战略安排 03-10
- 个人廉洁自律方面存在的问题及整改措施 05-12
- 谈谈青年大学生在中国式现代化征程上的 05-12
- 2022年党支部第一议题会议记录(全文完 11-02
- 作为青年大学生如何肩负时代责任6篇 05-12
- 村党组织建设现状及工作亮点存在问题与 05-12
- 全面从严治党,自我革命重要论述研讨会 05-12
- 产业工人队伍建设改革(全文完整) 10-31
- 11-25国庆70周年庆典晚会 庆典晚会串词
- 11-25办公室礼仪的十大原则 浅谈办公室的电话礼仪
- 01-17用心灵轻轻地歌唱_心灵的歌唱
- 01-17也许你不是我一生的唯一|也许不是我
- 01-17爱了,请珍惜;不爱,趁早放手|爱就珍惜不爱就放手
- 01-17岁月带走的是记忆,但回忆会越来越清晰|有趣又有深意的句子
- 01-17曾经的美好只是曾经,我只想珍惜身边的人|我只想珍惜你
- 01-18从容不惊 [学会笑眼去看世界,不惊不乍,淡定从容]
- 02-03当代大学生学习态度调查报告
- 02-03常用护患英语会话
- 标签列表
